Volume 12, Issue 2 Spring 2017
Contents of KB Journal Volume 12, Issue 2 Spring 2017
- 32764 reads
The Uses of Compulsion: Addressing Burke’s Technological Psychosis [Keynote Address]
Jodie Nicotra, University of Idaho
I'm so pleased to be here, not least because now I feel like I've come full circle with Burke and technology—writing this paper reminded me that back when I took Jack Selzer's seminar on Burke at Penn State in 2001 or so, I had initially proposed "Kenneth Burke and technology" as the topic for my seminar paper.* Jack said "eh, I don't think you want to do that. Why don't you write about Burke and this guy Korzybski instead?" Well, now I understand why he said that. I have to confess - about a third of my way into the research for this talk, I said out loud, "Why would ANYONE use Burke as a way to talk about technology?" But, as always, I'll be damned if I didn't come away understanding the human-technology relationship differently thanks to the depth of Burke's thinking about symbolic action and the function of language.
If the thinly veiled autobiographical protagonist of his short story "The Anaesthetic Revelation of Herone Liddell" was "haunted by ecology," then Burke himself was haunted by technology. Or perhaps it would be more proper to say that he was "goaded" by technology, judging by his repeated attempts to both theorize it and uncover some sort of symbolic action that might serve as a corrective. Beginning with "Waste—The Future of Prosperity," a prescient satirical essay from the late 1920s, the problem that Burke later termed the "technological psychosis" turns up again and again over the course of his career. But his later writings especially reveal what Ian Hill describes as "full apocalyptic overtones," an intensifying dread of technologically based environmental destruction that Burke, with comic ambivalence, viewed as the perfection, the logical, entelechial outcome of the rational animal's rationality.
Burke's pervasive anxiety about humanity's terrible, inevitable final goal manifests in these later works as an incessant hashing and rehashing of ideas. William Rueckert and Angelo Bonadonna characterize the Burke of the late essays as staging a "[relentless attack] on hyper-technologism" (On Human Nature 1), the essays rife with signs of his "late compulsion to refer back to earlier and other works of his, and to quote himself often" (6). Indeed, Burke himself likened his odd obsessiveness about technology to a compulsion. In one late essay, he admits to his "fixations about the problems of what I would call either 'technologism' or the 'technological psychosis'" ("Realisms, Occidental Style 105). In another he writes, "for several years I had been compulsively taking notes on the subject of technological pollution - and I still do compulsively take such notes." Burke actually loathed this compulsive note taking and longed to shut the door on the issue, "even," he wrote, "to the extent of inattention by dissipation. But it goes on nagging me" ("Why Satire" 72). If, as we can glean from reading this account, Burke took to drink in order to get shut of his obsessive attention to technology (not that he really needed that as an excuse), then certainly it must have had quite a grip on him.
Rueckert and Bonadonna suggest that Burke's obsession as it shows up in the redundancy of his later writings may have been the result of his advancing years combined with a loss of the desire to produce new work after the passing of his wife Libby. But further reading in Burke suggests that his language of compulsion in connection with technology warrants more sustained attention. Burke's own compulsions in regard to thinking about technology were also reflected in the way he talked about technology itself, to the extent that technology could be said to occupy a special third term in the nonsymbolic motion/symbolic action distinction that some scholars have marked as central to the whole of his philosophy. But more than this, I think pushing further on this idea of technology as compulsion actually suggests an avenue of response to the problem of technology as Burke sets it up. In my talk today, I want to dig a little deeper into Burke's attitudinizing of technology as compulsion and obsession; to think about what it means for Burke to characterize technology in this way, and the possibilities for action inherent in such a formulation. My talk is in two sections, the first being...
Haunted by Technology
For Burke, technology and language are deeply interconnected. In the afterword to Permanence and Change, he writes, "Technology is an ultimate direction indigenous to Bodies That Learn Language, which thereby interactively develop a realm of artificial instruments under such symbolic guidance" (296). Since for Burke as goes language, so goes technology, thinking about his treatment of one helps us understand the other. Despite his language of "instruments," Burke's depiction of the human relationship to both language and technology deeply troubles, if not reverses altogether, the typical understanding of control and agency. To wit, while the "Definition of Man" posits humans first as "symbol-using animals," reading a bit further clarifies that by this Burke doesn't mean that language is actually under our control, or that we can just use it in some instrumental fashion. He asks, "Do we simply use words, or do they not also use us? . . . An 'ideology' is like a spirit taking up its abode in a body: it makes that body hop around in certain ways: and that same body would have hopped around in different ways had a different ideology happened to inhabit it" (LSA 6). Likewise, since technology for Burke is inextricably bound up with symbol systems, he conceives of it less as an instrument than as a force that subsumes us, or at least a force that is not subject to our command.
As he suggests in the above passage, technology isn't simply neutral or passive, but has an inbuilt directionality - an "ultimate direction," to use his language. He writes, "I am but asking that we view [technology] as a kind of 'destiny,' a fulfillment of peculiarly human aptitudes" (296). Burke's mention of "destiny" and "fulfillment" here, of course, alludes to his appropriation of Aristotle's notion of entelechy; for Burke, entelechy is the "perfection" of language, such that the establishment of a particular terminology or nomenclature carries within itself its own "perfection" or inevitable end. And because of technology's inextricability from symbol systems, this entelechial drive is hence also inherent to technologies. As Burke explains in the afterword to Permanence and Change, human history has involved the turn from an early mythic orientation to what he writes is "our 'perfect' secular fulfillment in the empirical realm of symbol-guided Technology's Counter-Nature, as the human race 'progressively' (impulsively and/or compulsively) strives toward imposing its self-portraiture (with corresponding vexations) upon the realm of non-human Nature" (336). Note here Burke's language of impulsion and compulsion - the fulfillment of the technological imperative isn't just a passive happenstance of directionality, but an active drive. Thus, enmeshed in his notion of entelechy is this idea of an impetus or compelling force (i.e., something that's pushing through the perfection of symbol-guided technology). The language of compulsion, which crops up frequently in Burke's discussion of technology, appears most overtly in this passage from his satirical essay "Towards Helhaven": "Frankly, I enroll myself among those who take it for granted that the compulsiveness of man's technologic genius, as compulsively implemented by the vast compulsions of our vast technologic grid, makes for a self-perpetuating cycle quite beyond our ability to adopt any major reforms in our ways of doing things. We are happiest when we can plunge on and on" (61).
If entelechy comes from Aristotle, Burke borrows the language of compulsion from Freud, specifically the idea of the repetition compulsion developed in Beyond the Pleasure Principle. For Freud, the compulsion to repeat an originary psychic trauma across time and in differing circumstances was perhaps the most fundamental human instinct, albeit one that calls into question traditional notions of agency and freedom. Indeed, Freud suggested that the feeling of dread experienced by many people who are just beginning analysis might have its origins in the realization that they may not be as in charge of their lives as they'd like to believe. He writes, "what they are afraid of at bottom is the emergence of this compulsion with its hint of possession by some 'daemonic' power" (30).
David Sedaris's essay in the New Yorker called "Living the Fitbit Life" provides a comical, though pretty accurate portrait of such "possession by daemonic power." For those of you who don't know, a Fitbit is one of the new gadgets called "activity trackers," and it basically is like an amped-up pedometer. Sedaris writes, "To people like...me, people who are obsessive to begin with, the Fitbit is a digital trainer, perpetually egging us on. During the first few weeks that I had it, I'd return to my hotel at the end of the day, and when I discovered that I'd taken a total of, say, twelve thousand steps, I'd go out for another three thousand." His dismayed partner asks, "Why? Why isn't twelve thousand enough?" to which the narrated Sedaris replies, "Because my Fitbit thinks I can do better." Soon, the narrator finds himself walking more and more, driven by what he refers to as the "master strapped securely around my left wrist": first 25,000, then 30, 45, and finally 60,000 steps a day. He writes, "At the end of my first sixty-thousand step day, I staggered home with my flashlight knowing that I'd advance to sixty-five thousand, and that there will be no end to it until my feet snap off at the ankles. Then it'll just be my jagged bones stabbing into the soft ground."
Of course, Sedaris's description of the logical end of Fitbit wearing also happens to perfectly demonstrate Burke's definition of the entelechial function of satire, namely, "tracking down possibilities or implications to the point where the result is a kind of Utopia-in-reverse" ("Why Satire" 75). By the rationality of Sedaris's Fitbit, you must continue walking until you've worn your legs down to nibs. But while I agree with Burke that the Fitbit's symbolic framework is essential here for setting up this kind of logical end, I want to focus more specifically on the mechanisms of this compulsion. It's by the study of these mechanisms, I'll argue, that the "solution" for the technological psychosis diagnosed by Burke actually lies. To do that, I want to turn to an exchange that Burke had with Father Walter Ong, who, as you may or may not know, happened to teach at Saint Louis University for thirty years. The exchange between Burke and Ong provides some insight into the mechanisms of the technological psychosis.
This particular exchange of letters happened around an essay that Ong had sent Burke entitled "Technology Outside Us and Inside Us," in which Ong critiques instrumentalist notions of technology as "things 'out there,' in front of us and apart from us, belonging to and affecting the world outside consciousness" (190). Rather, Ong argues, we should think of how technologies also claim our insides, reorganizing our bodies through habit and reshaping our consciousness. Using the example of actual (musical) instruments, Ong points out that in learning to play, musicians must in a very material sense give themselves over to their instruments - as he writes, they "[appropriate] this machine, make it part of [themselves], [interiorize] it, gather it into the recesses of [their] consciousness" (190). Rich Doyle in Wetwares similarly articulates the human-technology relationship as a "grafting" that requires a hospitality of sorts to an inhuman form. This hospitality, writes Doyle, "relies intensely on forgetting; one must be capable of responding to the new action of a body….a capacity linked to a forgetting or an undoing of the old arcs of eye, hand, and memory" (5). In other words, we don't use technologies (including the ecologies that they come bundled with) so much as we are enticed or thrown into alliances that in return necessitate a reorganization of our bodies and our consciousness. Repeated encounters between human and technology in the light of purpose and scene prompt bodily reorganization in the form of new habits of action and perception, and new capacities. We might think of the regular user of Facebook, for instance, who starts to filter all of his experiences through the lens of their potential as written or photographic status updates; or the computer word processing program habitue, who, searching for a physical book on a shelf, finds her fingers reflexively attempting to use the Ctrl-F function; or the Fitbit user who becomes so accustomed to seeing his daily activity as the blinking dots on the device that he asks, like Sedaris, "Walking twenty-five miles, or even running up the stairs and back, suddenly seemed pointless, since, without the steps being counted and registered, what use were they?" This is more than human "use" of technology - in essence, through repeated interaction with the technology, a new virtual body has developed. And it is this virtual body, I want to suggest, that is the mechanism of the compulsion that Burke attributes to technology.
While Burke agrees with Ong's description of the mechanisms by which technology, in shaping humans, also serves as a compelling force, he still walks away from the exchange with a fatalistic view of the human-technology relationship. What he calls his "troubled attitude" in relation to Ong's essay is the fact that owing to technology's unintended byproducts (especially pollution and waste), and how much more powerful it makes individuals beyond their naked human bodies, no social or political system, no matter how full of self-consciousness, has been developed that can control "the astounding powers of technology." "Hence," he says, "mankind has a tiger by the tail." His Definition of Man reveals his lack of faith in the human ability to hang onto this tiger - he says, "The dreary likelihood is that, if we do avoid the holocaust, we shall do so mainly by bits of political patchwork here and there, with alliances falling sufficiently on the bias across one another, and thus getting sufficiently in one another's road, so there's not enough 'symmetrical perfection' among the contestants to set up the 'right' alignment and touch it off" (LSA 20). In other words, at his most pessimistic, Burke sees the technologically induced perfection of nuclear holocaust only not happening by chance.
Amplifying Obsession - Responses to Technology
Despite his anxiety about what he sees as the inevitable, terrible conclusion of the technological psychosis, Burke failed to secure a truly satisfactory solution to the problem as he defines it. As Rueckert and Bonadonna write, "Burke never developed a final vision beyond defining humans as bodies that learn language, establishing the link between language (symbol systems) and technology, and determining that technology was our entelechy" (272). Judging from the number of apocalypse narratives that currently populate screen, novel, and newspaper, there are many who would agree with Burke's fatalistic vision about the inevitable tragically perfect end of humanity's current rationally guided course. But I want to suggest that in Burke's very language of entelechy and irresistible compulsion there is a compelling framework for "solving" the problem of technology.
Because for Burke the human relationship with technology was thoroughly bound up with language, symbolic action was therefore the thing necessary to adequately address it. But what kind of symbolic action is the question. Perhaps because for Burke technology is so rooted in the idea of entelechy, both Burke and his critics assume that what is necessary to address the technological psychosis is a symbolic corrective - i.e., something that could serve to block or put the brakes on technology lest it continue rolling along to its disastrous finale of environmental apocalypse. James Chesebro summarizes the essence of this view in his argument that rhetorical critics must adopt a "decisively skeptical" role when it comes to the symbolic constructions of technology; everything must be put on hold until "dramatists have determined how a symbolic perspective can be used to counter technology" (279).
For some, such a corrective could only be grounded in human consciousness. Even Rueckert and Bonadonna, glossing Burke's take on the technological psychosis, fall into the consciousness trap. In their introduction to one of Burke's late essays, they write, "What you have at the 'end of the line' is a vast human tragedy which might have been averted if humans had paid heed to their own knowledge of what more and more technology might bring. We are not talking about pollution here, but about foreknowledge and the ability or failure to act on it. The other factor is the failure to foresee the consequences of an action or development" (4). With the language of knowledge and foreknowledge, we might hear in Rueckert's summary echoes of Ong's faith in human consciousness as the thing that might protect us from technology's disastrous consequences and preserve human freedom - that if we just knew enough or had enough knowledge about an issue, we could rationally discuss it and come up with a solution. Indeed, raising awareness about technologically induced environmental problems is what many environmentalists rely on to spur the public to action. But it's clear from even a cursory glance at the landscape of current public opinion and legislative wranglings over science and technology that mere awareness of problems (or even the provision of mountains of information and evidence) ultimately matters very little when it comes to decision-making or policy creation about environmental matters like, say, climate change.
Using tactics that are more recognizably Burkeian, T.N.Thompson and A .J. Palmeri recommend that rhetorical critics and dramatists develop what they call a "poetic psychosis" in order to counter Counternature. Psychotic poets would, they say, "exercise the resources and range of symbols, giving wings to 'agitating thoughts' so that they might enlist the action of others" (280), in countering technology. They write, ominously, "Poetic and comic correctives are needed to counter the rapid mutation of counternature before it reaches the 'end of the line' - its perfection - where the merger of mind and machine will leave no need for a poem" (283). But while I like this idea of fighting psychosis with psychosis, I still want to call into question the author's frame of rejection of technology here. [Problem with saying no - does Burke say anything about this in his ideas of the negative?.]
Satire was Burke's own solution for correcting the technological psychosis. As he explained in the essay "Archetype and Entelechy," satire can help reveal the terminological choices that lead to entelechies, but in a way that provides different possibilities for action. He writes, "satire can so change the rules that we have a quite different out. The satirist can set up a situation whereby his text can ironically advocate the very ills that are depressing us - nay more, he can 'perfect' his presentation by a fantastic rationale that calls for still more of the maladjustments now besetting us" (133). Burke employed this symbolic strategy of amplification in both his earliest satire on technology "Waste - The Future of Prosperity" and one of his final ones, "Towards Helhaven." With tongue in cheek, Burke suggests in the early essay that rather than people maximally waste in order to better the economy. He improves upon this amplification strategy in "Towards Helhaven" by "recommending" an action proposed by a certain gentleman who suggested that if a lake has been polluted, rather than turning backward or countering this action by asking how to undo or mitigate the destruction, to rather "affirmatively" address the issue by continuing to maximally pollute the lake, ten times as much - thereby, Burke writes, either converting it to a new form of energy or "as raw material for some new kind of poison, usable either as a pesticide or to protect against unwholesome political ideas" (61). The image is bitterly hilarious.
But even though Burke's approach to satire works mechanically by amplifying or pushing a particular notion through to its logical end, it still ultimately (as Thompson and Palmeri point out) is a frame of rejection. It hopes to counter technology, to say "no" to it. But, using Burke's notion of satire as a cue, what if we were to think of a form of symbolic action that uses this same strategy of amplification as a frame of acceptance - one that says "yes" rather than "no"? I want to suggest Burke's own concept of technology as irresistible compulsion as a candidate for this idea of amplification or pushing through. In other words, we might take the final words of the Helhaven essay - "No negativism. We want AFFIRMATION - TOWARDS HELHAVEN" (65) more seriously than Burke meant them - perhaps not in a directly material, technological sense, like adding maximal pollutants to a lake, but in a symbolic sense, whereby we amplify the concept of compulsion to its logical conclusion, by thinking of technology as a compulsion over which we have no control. What if we literally could not help ourselves when it came to technology? That we had to, as Burke says, "perpetually tinker" until we blew up the world or sank ourselves in a horrific miasma of pollution from which only the lucky rich few could escape? How could we use this very idea of compulsion not as a corrective to technology, but as a way to push it through? If nomenclatures, as Burke argues in his essay "Archetype and Entelechy," are formative, or creative, in the sense that they affect the nature of our observations, by turning our attention in this direction rather than that, and by having implicit in them ways of dividing up a field of inquiry" (Dramatism and Development 33), then naming and treating technology as a compulsion will reveal certain possibilities for responding, and foreclose others.
Consider, for instance, the range of responses by environmentalists to the problem of climate change, a convergence of factors that Burke would certainly have read as the moment before the apocalypse. Most mainstream environmentalist approaches - a perfect example being Al Gore's An Inconvenient Truth - rely on maximizing consciousness about climate change, the inherent assumption being that if people just understood or had enough information about the problem, they would change their behavior and their voting strategies. And while there's certainly nothing wrong with attempting to combat misinformation, one only needs to do a quick survey of the majority of Western attitudes to see that even if people have the "correct" information, it doesn't mean they'll automatically change their behavior or even their beliefs, thanks to factors like identification. (Along similar lines, X has an excellent article showing how, despite mountains of evidence for evolution, creationists still refuse to believe it).
Far more interesting approaches to the problem of climate change, I think, are those that amplify the idea of technology as compulsion by literally metaphorizing the Western relationship to oil as an addiction. Rather than setting up a frame of rejection, as do the strategies that rely on maximum consciousness, amplifications using the metaphor of oil addiction turn the attention affirmatively toward particular kinds of solutions. Those who adopt the nomenclature of oil as addiction can (to use more traditional rhetorical terminology), argue at the stasis of policy rather than fact or definition. They bring different sets of questions into play - like what is the most effective way to treat an addiction? For instance, Larry Lapide, the Research Director of MIT's Supply Chain Management 2020 initiative, argues that most American supply chains are "addicted to oil." The oil-as-addiction metaphor allows Lapide to move past arguments about whether there is a problem and who caused it to more pragmatic issues like identifying the most oil-heavy aspects of supply chains and encouraging businesses to analyze their own supply chains in order to make themselves less dependent on the fraught resource of oil. Lapide actually relies on a sort of petroleum-based Pascalian wager, recommending what he calls a "no regrets" risk management strategy when it comes to oil - namely, "Decrease your supply chain's dependence on oil to make it less vulnerable to price increases and supply chain disruptions." ("Is Your Supply Chain").
An even more interesting example is the Transition Network, an organization aiming to respond to the realities of climate change that was designed from the beginning around the concept that Western society is literally addicted to oil - in fact, the subtitle of The Transition Handbook, a bible of sorts for those who want to start a "Transition Initiative," is "From oil dependency to local resilience." In its pragmatic materials for guiding towns and other areas begin what Transition refers to as an "energy descent," lessening their dependence on oil, the Transition Network is grounded in metaphors of addiction. Arguing that generally speaking "the environmental movement has failed to engage people on a large scale in the process of change," (84), Rob Hopkins writes in the Transition Handbook that it is critical to understand how change actually happens, which led him to a model well known to addiction psychology called the Transtheoretical Change Model. The "Stages of Change," as the TTM model is popularly known, identifies a number of stages (like pre-contemplation, or the awareness of the need to change, through action, and maintenance) that addicts incrementally move through in treating their addiction. According to advocates of this addiction treatment model, understanding which stage one is in offers opportunities for understanding what might be blocking change (or, conversely, what pitfalls one needs to be aware of in the treatment of one's addiction). In applying this model to entities beyond an individual, Hopkins encourages potential Transition Initiatives to think of themselves as addicts and (like the supply chains above) apply the model to understand the specific nature of their dependence. As Hopkins says, "Recognising oil dependence makes it easier to understand why it might be difficult to wean ourselves off our oil habit, while also joining us towards proven strategies from the addictions field that might help us move forward" (87). A strategy of information—a strategy that says "yes."
Owing to his own tragic vision of technology, Burke ultimately could only view it through a frame of rejection. But while his writings specifically having to do with technology may not themselves offer to a productive response to technology, considered in a broader context - especially in terms of technology's enmeshment with language and all that entails in a Burkean sense, I find that they offer a way of thinking around the back door of technology, but one that says Yes rather than No, that affirms attitudes and hence pushes actions. Of course, I'm not suggesting that thinking of oil as addiction (or technology as compulsion) is the answer to all our environmental problems. But the general notion of looking for strategies of affirmation. I'll end here with an idea from Guattari that speaks to how I think Burke would have wanted to see technology were it not for this peculiar blind spot.
"This new logic - and I wish to stress this point - has affinities with that of the artist, who may be induced to refashion an entire piece of work after the intrusion of some accidental detail, a petty incident which suddenly deflects the project from its initial trajectory, diverting if from what may well have been a clearly formulated vision of its eventual shape. There is a proverb which says that 'the exception proves the rule'; but the exception can also inflect the rule, or even re-create it" (140).
The assignment according to Guattari is figuring out how to "promote a true ecology of the phantasm - one that works through transference, translation, the redeployment of the materials of expression - rather than endlessly invoking great moral principles to mobilize mechanisms of censure and contention" (141).
* This is an unrevised version of a keynote address at the Triennial Conference of the Kenneth Burke Society hosted at Saint Louis University in 2014. The revised version, "The Uses of Compulsion: Rewriting Burke's Technological Psychosis as a Posthuman Program," appears in Ambiguous Bodies: Kenneth Burke and Posthumanism, edited by Christopher Mays, Nathaniel Rivers, and Kellie Sharp-Hoskins. Penn State University Press.
Works Cited
Burke, Kenneth. "Waste, or the Future of Prosperity." The New Republic 63 (1930), 228-31. Print.
—. Language as Symbolic Action. Berkeley: U of California P, 1966.
—. "The Anaesthetic Revelation of Herone Liddell." The Complete White Oxen and Other Stories. U of California P, 1968. 255-310. Print.
—. "Towards Helhaven: Three Stages of a Vision." The Sewanee Review 79:1 (1971), 11-25. JSTOR. 20 Jan 2014.
—. Dramatism and Development. Worcester, MA: Clark UP, 1972. Print.
—. "(Nonsymbolic) Motion/(Symbolic) Action. Critical Inquiry 4:4 (1978), 809-838. JSTOR. Web. 16 Jan 2014.
—. Letter to Walter Ong. 9 September 1978. Walter Ong Papers. St. Louis University.
—. "Afterword: In Retrospective Prospect." Permanence and Change. U of California P, 1984. 295- 336. Print.
—. "Archetype and Entelechy." On Human Nature : A Gathering While Everything Flows, 1967-1984. Ed. William Rueckert, and Angelo Bonadonna. Berkeley: U of California P, 2003. 121-138. Print.
—. "Realisms, Occidental Style." On Human Nature: A Gathering While Everything Flows, 1967-1984. Ed. William Rueckert, and Angelo Bonadonna. Berkeley: U of California P, 2003. 96-119. Print.
—. "Why Satire, With a Plan for Writing One." On Human Nature: A Gathering While Everything Flows, 1967-1984. Ed. William Rueckert, and Angelo Bonadonna. Berkeley: U of California P, 2003. 66-95. Print.
Chesebro, James W. "Preface." Extensions of the Burkeian System. Ed. James W. Chesebro, Tuscaloosa: U of Alabama P, 1993. vii-xxi.
Doyle, Richard. Wetwares: Experiments in Postvital Living. U of Minnesota P, 2003. Print.
Freud, Sigmund. Beyond the Pleasure Principle. Tr. [from the German]. Bantam, 1959. Print.
Guattari, Felix. "The Three Ecologies." Trans. Chris Turner. new formations 8 (1989). Web. 30 May 2014.
Hill, Ian. "'The Human Barnyard' and Kenneth Burke's Philosophy of Technology." KB Journal 5.2 (2009). Web. 03 Jan 2014.
Hopkins, Rob. The Transition Handbook: From Oil Dependency to Local Resilience. Green, 2008. Print.
Lapide, Larry. "Is Your Supply Chain Addicted to Oil?" Supply Chain Management Review 11.1 (2007). ProQuest. Web. 06 Jun 2014.
Ong, Walter. "Technology Inside Us and Outside Us." Faith and Contexts. Ed. Thomas J. Farrell and Paul A. Soukup. Atlanta: Scholars, 1992. 189-208. Print.
Rueckert, William and Angelo Bonadonna. "Introduction." On Human Nature: A Gathering While Everything Flows, 1967-1984. Ed. William Rueckert, and Angelo Bonadonna. Berkeley: U of California P, 2003. Print.
Sedaris, David. "Stepping Out." The New Yorker 30 Jun 2014. Web.
Thompson, T. N., and A. J. Palmieri. "Attitudes toward Counternature (with Notes on Nurturing a Poetic Psychosis)." Extensions of the Burkeian System. Ed. James W. Chesebro. Tuscaloosa: U of Alabama P, 1993. Print.

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 20428 reads
Technological Devolution, Social Innovation: Attitudes Toward Industry
M. Elizabeth Weiser, The Ohio State University
Weep not that the world changes—did it keep /A stable changeless state, 'twere cause indeed to weep. —William Cullen Bryant
Abstract
Technology changes our identity, with the same ambiguous results Burke saw evidence of all around him eighty years ago.1 His reaction was to counsel caution, even repudiation, but his dialectical rhetoric and comic corrective offer a more nuanced theoretical approach to the ambiguous conversation between humans and technology. His theories point toward a means to replace both his extreme distrust of technology and industrial communities' previous naïve optimism with an active, critical shrewdness.
AS IAN HILL NOTES IN KB JOURNAL, "Because [Kenneth] Burke's theory of rhetoric is so intertwined with bodily survival and the technological threat thereto . . . Burke's critical program embodies a technological rhetoric." But his attitude is not friendly, Hill goes on: "Burke's observations of technology again and again emphasized its destructive capacity."
Rhetorical communication today, in contrast, with its emphasis on digital media analysis and production, oftentimes embodies a different sort of attitude. To paraphrase Bob Dylan, it is more like "better get out of the new world if you can't learn to code—for the times, they are a-changin'." Like so many, I teach my students to use the technology of the 21st century in a Rust Belt town bruised and battered by the technology of the 20th. So should our conversation with technology be one of praise or blame? Changing our viewpoint from the tragic to the comic frame makes it clearer that it is both. Technology has always been a-changin' our identity, with results more ambiguous, more akin to the love-hate relationship Burke saw evidence of all around him 80 years ago. His reaction—in his writing and his life—was to counsel caution, even at times repudiation, but his dialectical rhetoric and comic corrective offer a more nuanced theoretical approach to the ambiguous conversation between humans and technology. His theories point toward a means to replace both his extreme distrust of technology and industrial communities' previous naïve optimism with an active, critical shrewdness.
Because I study identity formation in museums, I became particularly interested in the potential manner in which this shrewdness was dramatized in museums in former industrial centers like my town. How do communities which thrived through technology, whose identity was based on their relationship to technology, narrate the story of their betrayal when that technological identity is lost? The experience of industrial museums in depicting the ambiguous human-technological relationship yields useful insights as we in post-industrial settings face the need to re-orient our perspectives.
In this brief article I compare two similar industrial museums—both named "Work"—in two similar industrial boom-bust-cautious recovery towns: Newark, Ohio (where I teach) and Norrköping, Sweden (where I worked while on sabbatical). I also look at the new industrial exhibits in the National Museum of American History, perhaps the first exhibits in any national museum to focus specifically on the business side of technological innovation. I examine museums because their epideictic frame is more likely to provide the space and time to consider multiple voices in debate, a hallmark of the comic frame. Through their promotion of a communal identity, they may also prompt visitors to engage as Agents in their world. I argue that Burke's interminable conversation in the comic frame, in a Scene which has the potential to promote identification with a polyvocal community, which has never been so important as now, as humanity continues "on the edge of the abyss" in a rapidly technifying world (Burke, "Anaesthetic Revelation" 296). Without recourse to an identity as Agents, communities facing industrial change as a tragedy become fatalistic and despairing, see heroes and villains rather than co-workers, invent scapegoats and strongmen, long for the past rather than challenging the future—in short, they become the "heartland" electorate that rose up in the last election in populist revolt against a changing nation. Changing the narrative that forms their identity is no mere aesthetic exercise, then, but a real-world exigence.
Before examining specific museum exhibits, let me acknowledge the ongoing conversations in museum studies over the degree to which any museum exhibit is memory rather than history, story rather than truth; as well as questions of whose memory/history/story/truth is recounted and to what effect. These are important questions, but leaving them aside in this article, I will instead focus on the effects of the narratives told by the exhibits, adopting Burke's pragmatic social constructivism that acknowledges both the viability of multiple perspectives and the recalcitrant nature of "reality": It exists, and it sets bounds on the ways the past can be portrayed and the future envisioned. As Edward Schiappa writes in a piece comparing Burke's master tropes and Thomas Kuhn's scientific paradigm shifts, "Despite the potential cries of relativism against both, neither Kuhn nor Burke meant that people can 'see' anything they want" in our metaphor-infused world "because, as Burke noted, 'the universe displays various orders of recalcitrance' to our interpretations, and we are forced to amend our interpretations accordingly. Thus, our perceptions have an 'objective validity' (PC 256-57, qtd. in Schiappa). It is not that museum exhibits and the communities they serve cannot shape the story, it is that the material objects, the communal memories, the larger sociopolitical context, and even the generic characteristics of narrative itself all set bounds on just how the shaping will occur—and it is the shaping and its consequences I examine in this article.
As Hill notes, Burke's concern with technology was due in part to its role in heightening people's natural reluctance to change in response to changing circumstances because "although capable of communicating, machines lack the poetic sensibility to react to changing conditions with altered symbolism." Human motivation is understandable but not rational, as Burke insisted repeatedly as a counter to his positivistic age—it is shot through with attitudes while "the technological machine [is] the external expression of the rational ideal" (Burke, "Literature and Science" 160). Technology, like the science that develops it, pushes the human toward that "rational ideal," but the human condition recalcitrantly refuses. Thus, wrote Burke in this 1937 address to the Third American Writers Congress, "I think that the restricted concept of scientific style is not adequate to name human motivations. I doubt whether references to 'causality' will ever 'explain' choice; they can only chart limitations of choice" (163). For Burke, it is the artist who sees beyond the strictures imposed by current expected connections to make new connections. These new juxtapositions, new ways of looking at a situation, are what allow people to move beyond an entrenched mindset—in this case, to see themselves as more than the cogs in a machine (particularly if that machine is now failing). Whether a given museum allows the needed juxtapositions into its narrative can mean the difference between a community asserting itself as a change Agent in the conversation with technology and a community struggling to do so, as we shall see.
The Towns
Newark, Ohio, pop. 48,000, and Norrköping, Sweden, pop. 87,000, are surprisingly similar. Both were home to prehistoric native communities which left important archaeological remains that both towns, until recently, have largely ignored. Both towns took advantage of their strategic transportation opportunities—rivers and railroads—to become proud engines of the Industrial Age during the 18th to 20th centuries. As a Norrköping pamphlet explains, "Several hundred years ago a number of factories were built along the river Strömmen. Imposing factory buildings took shape, providing many of the inhabitants with work producing textiles, weapons, paper and electronics. Norrköping was a flourishing industrial city for many generations" (Upplev Norrköping). Newark, meanwhile, was a stop on the Ohio & Erie Canal, the Baltimore & Ohio Railroad, and the National Road. Even today, Interstate 70, with its stream of semis delivering products back and forth across the country, runs just a few minutes south of town. By the 20th century Newark was the world's leading manufacturer of stoves and interurban cars, and its glass manufacturing, from Coke bottles to fiberglass, made it an important supplier in the global network. Large factory complexes dot its landscape. In the mid-20th century, Norrköping was called "Little Manchester"; Newark was "Little Chicago."
Clearly, the two towns' similarities are due in part to their integral roles in the industrial machine. As Burke noted in Attitudes Toward History, "We use the term 'world empire' with relation to technology because technology's vast and ever-changing variety of requirements means in effect that areas hitherto widely separated in place and culture are integrally brought together" (20). Both Norrköping and Newark utilized similar resources and locations to build powerful identities linking themselves to the global marketplace during the height of the Industrial Age, and with similar results. Beginning in mid-century, however, both towns suffered the effects of deindustrialization from automation and globalized competition. Little by little for the next forty years, the factories and mills shut down, thousands of people were thrown out of work, and the sense of identity in both towns suffered tremendous dislocation that continued through the turn of the new century. This was the destructive industrial force—or at least one of the destructive forces—that Burke saw as inherently threatening. The analogy Burke used in a 1974 article explaining his aversion to industrial technology was that "the driver drives the car, but the traffic drives the driver" ("Why Satire" 311)—that is, individuals are buffeted by the social force of the tools they supposedly control. Certainly this is what happened to the people of both Newark and Norrköping.
Out of this common industrial devolution, both towns opened museums devoted to their industrial legacy.
The Works Museum
The Works Museum, in Newark (hereafter the Newark Museum), was founded in the former Scheidler Machine Works, a 100-year old factory beside the mass of railroad lines and canal just south of the downtown courthouse square. Most of the museum, which attracts an audience mainly of local schoolchildren and their parents/grandparents, is oriented toward its ground floor science center, and the museum focuses the majority of its programming on science education and the returning small visitors who "play" in the center. But the reason the science center exists is because Newark identifies itself as a longstanding hub of technology, and that history is depicted on its much-less visited upper floor. One-third of this second-story space is devoted to the settlement and growth of the town into a "manufacturing city" during the19th century. Another third features volunteer-staffed "living history" displays from the era. A final third, "Manufacturing in Licking County," attempts to encapsulate the 20th century. Here are vitrines of self-contained displays from some dozen or so of Newark's key 20th century industries: Pure Oil, Rugg Lawn Mowers, Burke Golf Clubs, Wehrle Stoves, Heisey Glassware, Jewett Interurban Cars, Park National Bank, Holophane Lighting, Owens Corning Fiberglass.

Figure 1. Image of the Works Museum, Newark, Ohio, showing some of its historical exhibits of Newark industries. Photograph by the author.
More than half of the companies exhibited are now closed, and most of the others have seen significant local workforce reductions. The human impact on the workers of this dramatic change is only hinted at: "The Heisey Company closed its doors for Christmas vacation in 1957 and never re-opened." "In 1971 the Burke line moved to Morton Grove, Illinois." "By 1966 the plant was sold to the Roper Company." "The Jewett company declared bankruptcy in 1918 and never recovered." "What changes will take place in the 21st century?" asks the sign that closes the history section. Many of those changes have already occurred from the post-war industrial peak— the percentage of people in poverty in the County has nearly doubled in the first 15 years of the new century (Ohio Development Services Agency Research Office)—but that story is largely absent. Absent as well, then, is a dialogue on contemporary or future Newark.
What is this if not a Burkean terministic screen, the symbolic reflection of reality that by its very nature must be a selection of reality that must function also as a deflection of reality? Hill writes of technologists choosing terms that "select beneficial technological artifacts as argumentative proof of progress" thereby deflecting their "destructive reality." At the Newark Museum, the "proof of progress" that is selected is the glory that was, the technological achievements of an earlier era. The destructive reality that is deflected, therefore, is the human cost of the business cycles rendering many of these accomplishments obsolete. The company went bankrupt, the factory moved to Mexico, the business was sold to others . . . but what does this mean for the town? Because the Newark story focuses terministically on technology, it must spend its epideictic capital on praise alone—praise for the growing manufacturing might of the town, praise for the transportation channels, praise for the innovators who made technological advances and the entrepreneurs who opened factories; praise, then, for the factories themselves. If it were to epideictically blame anything, it would have to call into question the very advances—and advancers—that it is designed to praise.2
It is this gap in the selected conversation that the Arbetets Museum in Norrköping attempts to address.
The Museum of Work
The Arbetets—which means "Work" in Swedish, thus the Museum of Work—is housed in a former textile mill, and like Newark's The Works, it attracts a largely local audience of families, students, and retirees, with a smattering of tourists. Like Newark, the Norrköping Museum emphasizes upfront the educational fun of its children's science center. The historical aspects of Norrköping industry, meanwhile, are found next door in the Stadsmuseum (Norrköping City Museum), which includes a large section of textile mill and a "street" of 19th century tradesmen (cooper, cartwright, blacksmith, cobbler, tailor). So far this is not dissimilar to the Newark Museum, and from 2012-15 an exhibit of 20th-21st century history, displayed jointly in the two museums, echoed the post-war "Manufacturing in Licking County" exhibit as well. The synopsis for this exhibit, "Crisis and Vision: Dare to Love Norrköping," however, immediately makes it clear that the exhibit is more than epideictic praise for the glorious past. As it explains, "[h]istorically, the city of Norrköping has experienced both great successes as well as immense failures both of which have left their mark on the city and its inhabitants. What can we learn from these crises and visions and how will the city look in the future?" ("Facts about the Exhibition").
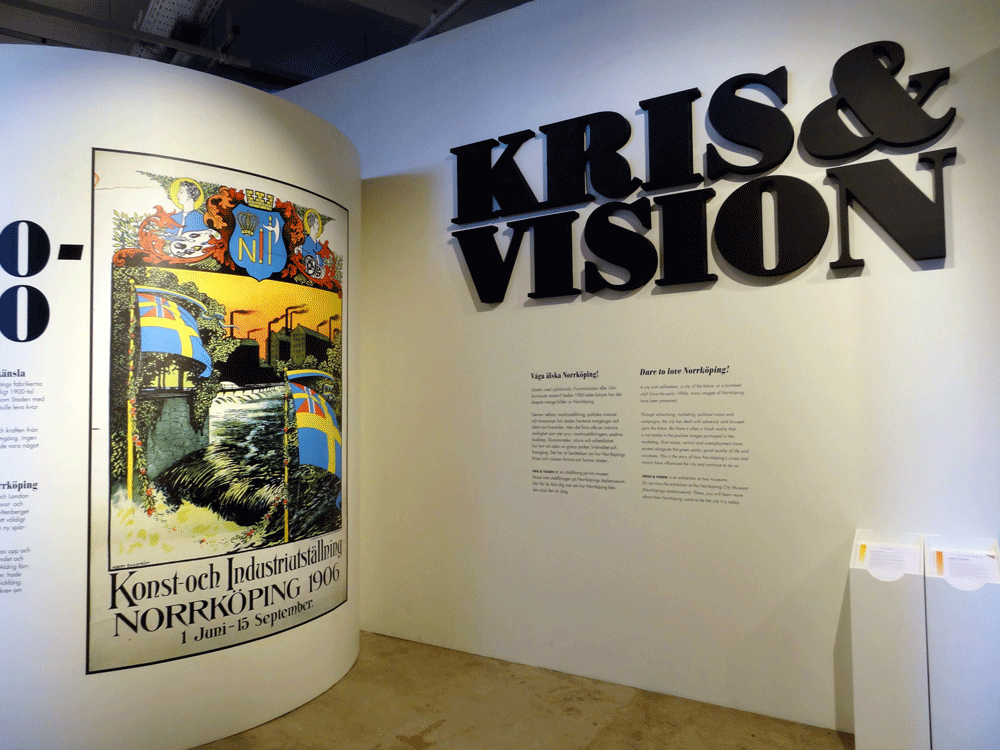
Figure 2. Image of the Arbetets Museum, Norrköping, Sweden, showing the entrance to its multi-year exhibition "Crisis and Vision." Photograph by the author.
With its mix of epideictic praise and blame for the communal values on display throughout Norrköping's 20th-21st century iterations, the exhibit wades directly into a conversation that would be familiar across the industrial rust belt: "What happened, and what will we do now?" Like Newark, Norrköping in the first half of the 20th century billed itself as "The City with Self-Esteem." Like Newark, its signage reports that it had transportation, "amazing gear-driven technology," and "skilled, low-paid workers." It is here that the "work life" orientation of the Norrköping Museum comes forth, however, as the exhibit goes on to add that "factory work at this time was low paid, dirty, noisy, and dangerous." While the Newark Museum mentions that post-war life was faster paced, the Crisis and Vision exhibit notes that that fast-paced life also meant that "The work tempo was increased and breaks were shortened." Industry was good for Norrköping—but not only good. Yet it was also not only bad. There are many examples of civic pride in the successful town. When textile mills began closing in the 1950s-60s, then, as the exhibit goes on to narrate, Norrköping struggled to respond. In its self-identified "City of Tomorrow" of the 1960s, it first attempted diversified industry and tourism. In the 1980s, "A Friendly Town" welcomed government agencies and demolished block after block of the old 19th century worker apartments. The exhibit shows a photo of the bright modern worker apartments that replaced the slums, but it also discusses the epithet resulting from this demolition—"The Bombed City." "The bleak 1990s" threw thousands more out of work, yet the exhibit also displays promotional videos from the period touting the pleasures of Norrköping for both tourists and businesses.
Looking to the Present
In the 2000s, the area around the Norrköping Museum has seen its sprawling, shuttered factories revitalized and turned into a college campus branch, a science park for new knowledge-based industries, shops, concert hall, and tourist office, all linked by pedestrian/bike pathways along the rejuvenated river in "The City of Knowledge and Culture."
The area around the Newark Museum is also revitalizing, with its 19th century courthouse and jail now deemed "historic" and marked for renovation, its closed movie and ballroom "palaces" turned into live concert venues, its square made pedestrian-friendly, its paved-over canal transformed into a covered Farmer's Market, and, slowly, ugly streetscapes turning into inviting areas. Industrial technology is also making new inroads into the county at large, with new companies moving in, taking advantage once again of the central location. Unemployment is down to 3.8% as of this writing, one of the lowest in the state (Williams).
At the same time, both towns face a continuing problem of poor health, low education, and un- (or under-) employment among their poorest residents. The workers that new industries need are dozens of highly skilled engineers and technicians, not the thousands of low-skilled line workers of decades past. This ambiguous recent development is documented in the Norrköping Museum exhibit, but not at the Newark Museum, where the epideictic praise-display upholding the value of Newark's past industrial greatness closes off the narrative from critique, and therefore from the possibility of discussing an ambiguous present. In contrast, the final sign in the Norrköping exhibit not only lays out the data on current successes and failures, it also encourages audiences to actively consider their impact and identify with the town: "Today, a lot of hard work is being done to create an attractive image of Norrköping. But the reality is more complicated. What is your view of Norrköping?" In a more dialectical world, people are the Agents in the conversation.
Assigning the Agents
What is it about the Norrköping Museum that allows it to engage visitors in the ongoing technology-driven changes outside its doors in a way that the Newark Museum cannot?
First, the mission statement of the Norrköping Museum focuses on people in dialogue, not industrial success. The Norrköping Museum's mission is "to document working life and bring its history to life through: providing a forum for debate and interpretation of the working lives and conditions of women and men" ("About the Museum"). Though this is similar to the mission statement of the Newark Museum, which aims to be "an interactive learning center where people of all ages can have fun and be inspired by the history, technology and artistic accomplishments of the communities we serve" ("About the Works"), there are two fundamental differences. One is the terministic screen through which the museums examine the role of industry in their communities. The Newark Museum adds to its mission statement an origin narrative noting that its founder "assembled a group of local citizens interested in preserving Licking County's industrial past" ("About the Works"). That is, preservation of industry was the impetus for the museum. Both museums recognize that workers and technology are the two components of industry, but the terministic screen for Norrköping—the linguistic lens with which it names its world—focuses on the workers ("working life") while that for Newark focuses on the technology ("industrial past"). Not surprisingly, then, the Norrköping Museum includes a number of social commentary exhibits among its rotating collections, such as the "Industrial Country—Sweden in the Modern Age" exhibit when I was there in 2012; "Job Circus," whose goal was both to help young people explore careers of the future and explain causes of the skills mismatch in 2014; or their recent "Land of Tomorrow," an exhibit that is "meant to be a tool box and source of inspiration for discussions and thoughts about a future that is sustainable – ecologically, economically and socially" ("Current Exhibitions"). That is, the Norrköping Museum uses its exhibits to re-orient its audiences from a late-century perception of themselves as (failing) industrial giants by posing critical questions designed to encourage thinking not so much about the technology itself but about the city's reaction to it, and their continuing reaction. The Newark Museum, in contrast, is more trapped in the past. It might, with its terministic screen of technology, add extant industries to its display cases, but by focusing on technologies rather than people its narrative can only relate the next industrial success rather than the ongoing town actions/reactions. Thus, its two industrial exhibits in the past few years have (1) added a display case on communication that "encourages all to examine how the cell phone has changed their own life and the world" ("History Exhibits"); and (2) housed a temporary exhibit on the history of glass-making, focusing on praising the post-war innovations of mid-century giants Owens Corning and Holophane, two companies that have downsized and closed in the county, respectively, in the past 10 years.
The difference in their terministic screen (industrial past or working life), in turn, affects to whom they assign the pentadic role of Agent in the dramatic conversation between human and technology. Newarkians should love Newark because it has been great. This terministic choice, however, in combination with its necessary focus on decades-old history, has consequences not only for the narrative but also for the current communal identity of the narrative's audience. To Newarkians today—to the 21 percent below the poverty line, for instance (Ohio Development Services)—"it has been great" is neither a current reality nor a future promise with which they can personally identify. The possible responses to this narrative of past industrial greatness are only passive: People can despair that the greatness is gone or they can wait for it to return (and hope it touches them). In this light, even the vote for a demagogue who promises to "Make America Great Again" is in the end a passive gesture—a shot in the dark that someone with the authority of industry can make bring back the past for them. In all cases, it is industro-technology which is the acting Agent, the one in the driver's seat, not humanity.
In contrast, the Norrköping Museum narrative is not one of industrial greatness but of industrial greatness and corresponding humanitarian difficulties. Its focus on working life means that its epideictic narrative can both praise workplaces for their industrious innovation and blame them for working conditions, pay, etc. Focusing on the social means focusing on the town, in other words, and the town can advance and retreat and (ambiguously) advance again. This is a narrative not of greatness but of resilience, and innovative Agents are not only technological but also social—perhaps most importantly social. Burke thought this focus on sociability to be key to understanding human motivation. Humans, he thought, were best explained not by their role as individuals who happened to join into groups, but as primarily political beings, "a context of definition whereby his individual role is defined by his membership in a group" ("Literature and Science" 165). It is through their identification as social/political beings that humans find themselves, Burke thought, not vice-versa, and therefore a focus on social resilience is in essence an appeal to human nature. Norrköpingers are encouraged by the museum narrative's praise and blame of the ongoing social history to identify with this ongoing social resilience of the town itself, and this calls for a more active response than that of Newark. It is a response that promotes ongoing cooperative innovation. To put it another way, residents of Norrköping are encouraged by the narration of their past century to become participating Agents in the succession of challenges and successes brought by technology to their town, while residents of Newark are prompted by the narrative to see their historic role as passive Agencies who may (or may not) be used by the industrial Agents that are changing the town today.
The Comic Corrective, the Industrial Past, and the Critical Present
Burke's America in the late 1930s was a time not wholly unlike our own. The disruptions and hardships of the Depression dragged on, war grew more and more imminent, and the bright promise of technology to make lives better that was so keen in early decades of the century grew increasingly muddied by its human consequences. Despite widespread struggle and the specter of worse, however, people did not rise up and embrace structural change—and Burke struggled in articles and books to understand why not. As he put it his 1937 piece for the Third American Writers' Congress, "[I]f we do learn by analogy, if we do form our response to new situations on the basis of what we have learned from past situations, it would seem to follow that we must, to an extent, be hypnotized by a past situation while confronting a new one" ("Literature and Science" 169). Technology was the rational outcome of the rational mind—and if the rationality that produced the very technology creating such new situations could only lead to continuing down the same path, regardless of human desire for other choices (the traffic driving the driver) then some way of perceiving the situation that was less purely rational was a needed corrective. As I've written about elsewhere (see Weiser, Burke, War, Words), it was the New Critical way of looking at old situations, exploring juxtapositions and paradoxes, embracing ambiguity, all so much a part of the modernist poetry of the early 20th century, that was Burke's model of the "sharp sound that awakens us [from our hypnosis], at times when the rise of new materials requires us to shake off an old perspective and to frame a wider circle of correctives" ("Literature and Science" 171). That is, the solution to "technosis," the kind of rational technological perspective that would lead to misery and war, was not more of the same but something different, a new, wider frame of reference enabled by a conscious reframing from inevitable tragedy to Agent-driven comedy.
To return to Burke's technological conundrum, does the fast-paced world in which so much of society finds itself, with technological advances that drive the driver, benefit society or threaten it? Although in Burke's 20th century those in power largely answered "benefit" and Burke therefore focused on "threaten," a Burkean comic frame would instead answer "yes." Yes, it does both, but—as was evident at the recent global climate summit—it is humans, not machines, who have the potential agility to adapt their conversation with technology to reflect changing Scenes and the shrewdness to continue the dialogue. Burke's stated view on technology seems so decidedly negative—as he sums up in "Why Satire," a relentless drive toward industrial technology produces waste, war, and pollution—that it seems too hopeless, of little use in forming an adequate conversation of "words about words about technology." For in fact Burke's view was rarely hopeless, and he both acknowledges the extremes of his perspective and offers a possible way out via what he termed from the beginning of his career the comic corrective (see Attitudes Toward History). While in a dramatic tragedy it is only through human suffering that catharsis is achieved, he noted, within the comic frame difficulties are not viewed as evils but as mistakes—and mistakes can be fixed. Thus Burke's explanation for the differences between the reactions to past greatness and ongoing resilience would be that the people of Newark are asked by their own industrial narrative to place themselves in the frame of a technological tragedy, invoking heroes and villains (then deflecting from the perceived villainy), while the people of Norrköping can place themselves within the frame of a social comedy, with its cast of fools, and then act to fix mistakes made earlier.
The outcome of the former is inevitable, that of the latter is a work in progress; thus, the tragic frame, Burke acknowledged, does not really offer a true perspective on the technological world.
Though the present developments of technological enterprise . . . have led to the affliction of much suffering, and raise many threats, the technologically experimental attitude behind all such activities is not in spirit tragic. So far as I can see, the technological impulse to keep on perpetually tinkering with things could not be tragic unless or until men became resigned to the likelihood that they may be fatally and inexorably driven to keep on perpetually tinkering with things. . . . Also, I keep uneasily coming back to the thought that, with the cult of tragedy, maybe you're asking for it. ("Why Satire" 312)
The technological impulse does not, in fact, lie in the hero-or-villain arena of tragedy unless we resign ourselves to its inevitability—whether that inevitability is the wasteful destruction of the planet or the technotopia of a brave new world. Thus pure indictment as surely as pure praise of our technological identity merely reduces our role as Agents in our own conversation.
The comic frame is the escape from the passive resignation or disengagement of such either-or thinking. "The comic frame of acceptance," he wrote in Attitudes toward History, "considers a human life as a project in 'composition,' where the poet works with the materials of social relationships" (173). As Burke had discussed in Permanence and Change, much social interaction tends toward stagnation rather than action—it was either wholly "euphemistic," upholding the status quo, or wholly "debunking," tearing down the existing structure (166). The comic attitude toward social interaction, in contrast, is neither overly sentimental—a nostalgic remembrance of better times—nor overly shocked when faced with the betrayal of those good times. It is instead a "shrewd but charitable" view toward one's opponents, one that acknowledges the possibility of betrayal even while continuing to engage, "picturing people not as vicious, but as mistaken. When you add that people are necessarily mistaken, that all people are exposed to situations in which they must act as fools, that every insight contains its own special kind of blindness, you complete the comic circle" (ATH 41). This shrewdness is what allows for social interaction rather than withdrawal— in interpersonal relationships as much as in political parlays and social dynamics. We might build an industrial empire only to lose it all and throw thousands out of work, we might pin our hopes on an industrial savior only to see it move to a cheaper labor market, we might try to clear out the slums and make better housing for all only to look like we've bombed our own city, we might better our lives through technology only to realize it is destroying the planet . . . and then, if properly primed by narratives of past engagements in similar dire moments, we might keep on trying. Notice again the Norrköping Museum's "Land of Tomorrow" exhibit: In a "future that takes the threat of climate change seriously," "what can you or I do?" it asks. Improving the conversation with technology—which is both part of the problem and part of the solution—is key to that future.
The comic frame, therefore, is not only a corrective to an overly rational historic hypnosis, not only a pragmatic solution. In its ambiguous perspective, its acknowledgment that there are multiple cuts of cheese even as one's own looks best, it is also the best way to converse with technology because technology itself is an ambiguous conversant, neither villain nor hero. At times technology is the Agency or tool, the thing made by our industrial genius; at times the Action, the interactive exploration of our innovative selves; oftentimes it is the problematic Scene, the context within which industrial cities like Newark and Norrköping forge their communal identity; other times it is the Purpose, its perfection the entelechial end goal of our actions regardless of the human consequences. As hero or villain or fool, it can appear also as the co-Agent with us humans, acting on us even as we act on it. The comic frame, though, reminds us that we humans are also always Agents in this drama, needing to act and react to the ongoing conversation with technology.
The National Museum of American History
To demonstrate a bit of this comic frame enacted in a cultural scene, let us look at one other museum, the National Museum of American History (hereafter National Museum) in Washington, DC. Unlike Sweden's national museum—indeed, unlike any of the 25 other nations' museums that I examine in my forthcoming monograph Museum Rhetoric—the U.S. National Museum has two permanent exhibits (opened in July 2015) expressly devoted to industrial entrepreneurship and business innovation. To what extent does the comic frame exist in the narratives of these two exhibits? How is ambiguity acknowledged, and who are the Agents in this industrial scene—people or technology?
The more technologically focused exhibit, "Places of Invention," uses a tripartite narrative frame of people, place, invention to tell the stories of six American regions where technological innovation occurred. "What kind of place stimulates creative minds and sparks invention and innovation?" asks its introductory sign. "See what can happen when the right mix of inventive people, untapped resources, and inspiring surroundings come together." In dramatistic terms, particular groups of Agents paired with particular Scenes and Agencies enabled an innovate Act moving the nation into the modern world. So for instance, Stanford, sunny weather, and a "casual but fiercely entrepreneurial business climate" lured tech workers who eventually banded together as "academic, corporate, and hobbyist communities [to] invent the personal computer" in Silicon Valley. These simple, monologic praise narratives are openly family-friendly, not meant for in-depth critical thought. Its exhibits, however, do walk a line between our two local "Works" museums by assigning agency to people and places in conversation to produce technology. That is, if the dot.com bust, gender equality, or privacy issues are not discussed in the Silicon Valley section, neither are the silicon chip nor Ed Wozniak given sole credit for personal computing. Collaboration, the narrative tells us, was the key to the invention—and what better way to materialize Burke's dramatistic contention that in any symbolic action the Act, Agent, Agency, Scene, Purpose overlap, none of them complete without the others, because "we are capable of but partial acts, acts that but partially represent us and that produce but partial transformations" (GM 19). The comic ambiguity of these partial acts-interacting is the essence of how invention occurs in the "Places of Invention" story.
This partial biographical agency given to communities of people interacting in places is continued in the narrative of the other new permanent exhibit, "American Enterprise," just across the hall. The intended audience for this exhibit is clearly older, more educated, and more willing to take the time to contemplate than the audience for Places of Invention. Thus artifacts are musealized in vitrines with a variety of signage offering both casual and in-depth reading, but the attitude of knowledge-production is not necessarily equated with one solo Truth. Instead, American enterprise in this exhibit moves by fits and starts, sometimes taking a wrong path only to course-correct later, generally moving toward increased industrialization but always within a scene of ongoing debate over whether this movement is necessarily "progress." The exhibit moves chronologically and divides US industrial history into four epochs: the Merchant Era, Corporate Era, Consumer Era, and Global Era. Each section tells its story from a variety of perspectives, making overt for the visitor those multiple cuts of cheese that, as Burke insisted, would make it easier to view one's own cut as just one possibility. For instance, in the Merchant Era visitors learn about business in the early years of the nation from the stories of Metis fur traders, Eli Whitney, shopkeeper William Ramsey, weaver Peter Stauffer, and stories of electricity, slavery, debt, gold, and land grabs.
As we can see already, the frame of the exhibit allows for the inclusion of a number of "mistakes" in the entrepreneurial path, from slavery to (later) the annexation of Hawai'i, the Dust Bowl, and consumer debt. Rather than a tragic frame that insists on either epideictic praise or blame, the comic frame of the exhibit allows for both/and in the interaction between human and technology. For example, it notes that with digital technology, "immediate access to everything helped spawn a social media revolution, gave consumers greater choices, and sped up business. Some loved being connected, but others worried that they could never escape work or surveillance." The artifacts accompanying this ambiguous signage also sometimes support the narrative of praise and sometimes that of blame. Thus, accompanying the digital technology sign is a radial display of all the types of devices (phone, watch, camera, map, computer) that are now contained in one smartphone—a praise display. But accompanying the signage on globalization, which tells us that "in a globalized economy, innovative ideas and products flowed easily across national borders," a more ambiguous display includes a Japanese McDonald's sign, a Walmart truck, and a Disney shirt, raising questions about the kinds of "innovations" flowing across the world. And a vitrine discussing green business practices, which notes that at first "companies responded with empty public relations campaigns" and only later saw the potential for profit, accompanies this statement with photos almost exclusively of people, rather than technology, acting to promote change for a more sustainable future. Within a comic frame these human Agents interacting with technology need not be pure in their motivations nor produce wholly praiseworthy results in order to proceed. Indeed, the history of wrong turns included in the entrepreneurial story lessens the need to imagine that such future-forward acts as digital media, globalization, and sustainable energy must be already resolved as good (or bad). In the comic frame, where tragic absolutism turns to comic potentiality, they may well be good and bad.

Figure 3. An image of the National Museum of American History, Washington, DC, showing the diversity of perspectives in its display of industrial eras. Photograph by the author.
At the end of each of the four industrial eras, signage "Debating Enterprise" sums up the intended comic frame of the exhibit…. and Alexander Hamilton debate whether government should promote industry at all or should encourage farming to grow the new nation. (Admittedly, these "differing voices" are nearly exclusively male, a weakness of their selection.) The visitor may infer that the question of how to balance government and business for the benefit of the nation has been the predominant debate of American enterprise—and it is a debate at best unresolved and perhaps unresolvable. That as readers of this article we may feel strongly that there is, in fact, a proper balance that, almost certainly, the nation has not achieved demonstrates our propensity to embrace the tragic frame of right and wrong, good and evil. The comic frame opts instead for the ambiguous answer between Agents whose varying positions are not considered evil but at most mistaken, and partially foolish, capable of persuading/being persuaded.
Conclusion: Symbolic Engagement
In his presentation at the 9th triennial Burke conference, Jimmy Butts argued that for Burke it would be the end of the conversation that would be the real tragedy. Butts began with Burke's interest in the word "apocalypse," which (like substance, another favorite Burkean word) has a paradoxical meaning. From its Latin root, kalypto, we get "eclipse," a covering of the sun; adding apo- or "away from" gives us the "apocalypse"—so the cataclysmic end-time is literally an unconcealing or unveiling, "a revelation of the truth," says Butts. For Burke the end of the world as we know it, the entelechial stasis would be the revelation of some ultimate truth that ended the interminable conversation that is "always decentering" (Butts). Such a revelation of truth is often a desired goal—including a goal of visitors to a museum, who want to hear the one true story—but Butts points out that for Burke it is the ever-ongoing conversation that keeps us from apocalypse. The end of the debate is stasis, and in any living organism stasis equals death.
As is evident in today's spiral of rancorous, ad hominem attacks, most of us do wish for an end to the always decentering dialectic whenever we debate opponents with strongly held beliefs. Surely the giant industrial complex of the 20th century either was, in truth, heroic or was, in truth, demonic. It is well to remember that in Burke's definition of the human, homo dialecticus, the creature who "by nature respond[s] to symbols" (Burke, RM 43), is also homo technologicus, "separated from his natural condition by instruments of his own making" (On Symbols and Society 70). What industrial museums and exhibits offer to the polarized world of homo technologicus, then, is a way to poetically interact with alienated (and alienating) technology. Recall Hill's insight that Burke's concern with technology was that it impeded change because unlike humans "machines lack the poetic sensibility to react to changing conditions with altered symbolism." The comic frame of a narrated exhibit can bring the human visitor into conversation with her own inventions—be they a full-scale turn-of-the-century machine workshop (Newark) or automated looms producing real woolen items (Norrköping) or the knick-knack-filled workshop of the inventor of Pong (National). They remind us materially of the relationship between humanity and technology. Though this can potentially be a mere nostalgia trap, the museal equivalent of "make America great again," it can also engage us in the narrative. And narrated as a heuristic for a community seeking agency, this engagement with the comic past of trial and error and trial again is an argument to move from the disempowering search for heroes and villains. As the National Museum asks visitors repeatedly, "What would you do?" This is the question not of victims of a tragic past but of citizens of an ever-struggling (ever-striving) future.
Notes
1. A version of this article was presented as a conference paper at the 9th Kenneth Burke Society Triennial Conference, July 2014. I am indebted to James Zappen's 2014 presentation at the Triennial Conference for the idea of this human-technology interaction as a "conversation" and a relationship, as well as his gracious reading of an earlier draft of this article. I am also grateful for the insightful comments of the KB Journal reviewer whose advice better focused the final draft.
2. Newark's newest permanent exhibit does highlight a person—local resident Jerrie Mock, who in 1964 became the first woman to fly solo around the world—but visitors are asked to imagine being her ("test your skills at a flight simulator"), rather than being asked, for instance, to consider how we in Newark today teach or learn the skills to become first in the world in a field.
Works Cited
Arbetets Museum. "About the Museum." n.d. Web. 2 Aug 2014.
—. "Current Exhibitions." 2015. Web. 13 December 2015.
—. "Facts about the Exhibition." Norrköping, Sweden, n.d. Print.
Burke, Kenneth. "The Anaesthetic Revelation of Herone Liddell." The Complete White Oxen: Collected Short Fiction. Berkeley: U of California P, 1968. 255-300. Print.
—. Attitudes Toward History. 3rd rev. ed. 1937. Berkeley: U of California P, 1984. Print.
—. Counter-Statement.1931. Berkeley, CA: U of California P, 1968. Print.
—. On Symbols and Society. Chicago: U of Chicago P, 1989. Print.
—. Permanence and Change. 1935. Berkeley: U of California P, 1984. Print.
—. "The Relation between Literature and Science." Henry Hart, ed. The Writer in a Changing World. New York: Equinox Cooperative Press, 1937. 158-71. Print.
—. A Rhetoric of Motives. 1950. Berkeley: U of California P, 1968. Print.
—. "Why Satire, With a Plan for Writing One." Michigan Quarterly Review 13.4 (1974): 307-37. PDF.
Butts, Jimmy. "How Burke Wanted to Save Us from Our Techno-Apocalypse." 9th Triennial Conference of the Kenneth Burke Society. St. Louis, MO, 19 July 2014. Presentation.
Hill, Ian. "'The Human Barnyard' and Kenneth Burke's Philosophy of Technology." KB Journal 5.2 (2009). Web. 1 Aug 2014.
Ohio Development Services Agency Research Office. The Ohio Poverty Report. Columbus, OH, 2014. PDF.
Schiappa, Edward. "Burkean Tropes and Kuhnian Science: A Social Constructionist Perspective on Language and Reality." JAC 2.13 (1993). Web.
The Works: Ohio Center for History, Art, and Technology. "About the Works." 2014. Web. 2 Aug 2014.
—. "History Exhibits." 2015. 13 December 2015.
Upplev Norrköping. The Industrial Landscape. Norrköping, Sweden: Upplev Norrköping AB, n.d. Print.
Williams, Mark. "Central Ohio Jobless Rate at 14-Year-Low." Columbus Dispatch 22 Sept. 2015. Web.
Zappen, James. "Kenneth Burke's Conversation with Technology." 9th Triennial Conference of the Kenneth Burke Society. St. Louis, MO, 19 July 2014. Presentation.
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 21882 reads
Consummation: Kenneth Burke’s Third Creative Motive
David Erland Isaksen, University College of Southeast Norway
Abstract
Kenneth Burke scholars differ on what the meaning of Burke's concept of consummation is and how it relates to perfection and entelechy. This article argues that consummation is a third creative motive (transcending self-expression and communication) that requires a rigorous vocabulary in order to be an active motivational force.
IN “A RHETORIC OF FORM: THE EARLY BURKE AND READER-RESPONSE CRITICISM,” Greig Henderson writes that we can divide Kenneth Burke’s scholarly project based on three creative motives which were at the center of his attention: self-expression, communication, and consummation (Henderson 127). Kenneth Burke himself discusses these three stages in his 1967 afterword to Counter-Statement, titled “Curriculum Criticum”: “The step from the opening chapter . . . to the next essay . . . clearly indicates a turn from the stress upon self-expression to a stress upon communication. And all that follows can be properly treated as the tracking down of the implications inherent in this turn. In later works I have added an explicit concern with the kind of consummation that is inherent in this very process of ‘tracking down the implications of a nomenclature’” (223-4). In other words, the transition from the first to the second chapter of Counter-Statement shows us Kenneth Burke shifting his focus from self-expression to communication, and the rest of the book tries to come to terms with (or track down) what it means to consider a text and its aesthetic qualities in terms of communication rather than self-expression. According to Burke, these findings were already implicit in the turn to communication, and he spends most of the book making them explicit. Later, he looked at the process he went through to track down the implications of this turn and “the kind of consummation” inherent in that process. By “the kind of consummation” I believe he is referring to the kind of drive, motivation, or urge he had, to find and flesh out the implications of this turn. Although Kenneth Burke never abandons self-expression or communication, we could make a rough outline of this scholarly progression based on these three creative motives, with the pre Counter-Statement era (1915-1931) concerned with self-expression, the 1930s and war years (1931-1945) concerned with communication, and the vast bulk of Burke’s later work (1945-1993) concerned with, or at least including a concern with, consummation. Of course, neither of the three motives are absent in his later work, so the best description of this progression may be as a shifts in emphasis rather than complete turns. 1
Even though consummation occupies a very central place in Kenneth Burke’s critical terminology, Burke himself mentions it by name very rarely. We find it mentioned twice in A Grammar of Motives, once in the essays that were meant to be a part of A Symbolic of Motives, twice in Rhetoric of Religion, four times in Language as Symbolic Action, and once in the essays collected in On Human Nature: A Gathering While Everything Everything Flows, 1967-1984. Yet the principle is discussed and illustrated at length in the manuscript Poetics, Dramatistically Considered (parts of which have been published in Unending Conversations) and it is referred to many times without him using that specific name. For example, William H. Rueckert writes in the preface to On Human Nature that the drive to take a vocabulary to the end of the line, which I argue is consummation, was Kenneth Burke’s major concern in his final years. Kenneth Burke himself refers to this drive as “consummation” on page 244 of the collection, but throughout the other essays he gives a description of the drive without using the word consummation. The drive is discussed in detail on pages 73-78 and is a recurring theme throughout the entire collection. 2
A survey of secondary scholarship and recent dissertations on related terms highlights the disagreement concerning this concept among some scholars and the complete absence of the term among others. Considering the density of Burke’s scholarship, it may not be surprising that this term has not been more developed and used in secondary scholarship than it has. Many scholars use terms like entelechy and perfection to discuss what Burke describes as consummation in the sources mentioned above. Others claim that Burke’s use of the term was similar to or the same as that of George Herbert Meade and John Dewey, or connect it with his concept of catharsis.
However, based on Burke’s writing, I claim that consummation is substantially different from entelechy and perfection. Whereas entelechy and perfection describe general tendencies and motivations, consummation is explicitly a linguistic phenomenon since it is the explicit drive to “track down the implications of a terminology.” Burke explains it with the example of an artist who starts with a desire for self-expression, develops this expression through a public medium for communication, and as a part of that process "encounters possibilities purely internal to the medium” that the artist then feels driven to complete or develop into reality “regardless of either self-expression or communication” (“Watchful” 48). As such, consummation describes a specific stage in the development of a terminology where the dialectic of self-expression and communication has developed a vocabulary with a momentum and life of its own. 3
Consummation in Secondary Scholarship
As mentioned above, few Burke scholars treat consummation individually as a significant term, often grouping or conflating it with entelechy or perfection. For example, in Kenneth Burke: Rhetoric, Subjectivity, Postmodernism, Robert Wess claims that “consummation” is basically a synonym for culmination, entelechy, and perfection, and that “sometimes even the same examples are used to illustrate entelechy in one context and another term in a different context” (246). However, Wess does not claim that consummation means exactly the same as the other terms, but rather that they are a part of the same “cluster of terms and examples” (246) 4. Of these terms, Wess chooses to discuss primarily entelechy and perfection and does not clarify any further how consummation is related to these. It may be indicative of similar thinking that in Kenneth Burke in the 21st Century, an edited collection of papers from the Kenneth Burke Society, there is not a single mention of consummation; however, there are frequent mentions of entelechy as a central principle. The way entelechy is described in this collection often sounds similar to how Burke describes consummation. For example, Star Muir writes that entelechy means “the tracking down of implications within a particular vocabulary” and that “Entelechy is illustrated, for Burke, in the scientific ‘perfection’ of the vocabularies of genetic manipulation” (36). Here, it seems that Muir conflates the principles of entelechy and consummation.5
There is a similar tendency to conflate perfection and entelechy or use them together without distinguishing clearly between them. In “Perfection and the Bomb: Nuclear Weapons, Teleology, and Motives,” Barry Brummett uses Burke’s concept of perfection to analyze why the atomic bomb is “such a powerfully motivating symbol” (88). He writes that the concept of perfection “is based on Aristotle’s idea of entelechy” (85) and describes a motive to extend and complete a vocabulary as “perfectionist,” implying that it is related to the drive for perfection. Brummett does not explain the specific relationship between the perfectionist motive, entelechy, and perfection, but the general impression is again that these terms are related, but do not mean exactly the same thing. In “Reassessing Truman, the Bomb, and Revisionism: The Burlesque Frame and Entelechy in the Decision to Use Atomic Weapons Against Japan,” Bryan Hubbard writes that entelechy is “the drive towards perfection,” so entelechy is the drive and perfection is the aim or end of the drive. This drive, he writes, “results from our ability to use symbols to envision the extreme ends of behavior” (360). Consummation is not mentioned by Brummett or Hubbard, which may indicate that they accept consummation as simply a synonym for entelechy.
Other scholars have briefly discussed the concept of consummation, but usually in a way that is peripheral to their main argument. In the introduction to Unending Conversations, for instance, Greig Henderson and David Cratis Williams write that Burke “shows how the motives of self-expression, communication, and consummation interanimate each other” (xi), but then do not write about exactly how Burke shows this. Henderson recognizes it briefly as a central motive in Kenneth Burke’s scholarship, but concerns himself more with the communicative aspects of Burke’s aesthetic theory (127). Similarly, Donald L. Jennerman briefly discusses consummation in “Burke’s Poetics of Catharsis.” He claims Burke developed consummation from his concept of “internal catharsis,” where a work is purified by being completed just as the fear and pity of the audience are purified by experiencing a tragic play. He states that this internal catharsis contains an “entelechial motive” and is “primarily an intellectual or aesthetic catharsis rather than emotional, it pertains less to pity and fear than to consternation and pleasure” (Jennerman 45). Yet, because his focus is on comparing the social and the individual aspects of Burke’s concept of catharsis, he does not discuss how this motive is developed and sustained. Cary Nelson discusses Burke’s more radical claims about language’s power to determine human action in “Writing as the Accomplice of Language: Kenneth Burke and Poststructuralism,” and includes a brief mention of consummation as the natural result of language and an “unconscious” that is desirous to complete terminologies (162). All these authors give some interesting insights, but do not give us any in-depth treatment of the concept.
Finally, there is a group of Burke scholars who connect consummation to the aesthetic theory of John Dewey and see it as the conclusion or result of a completed aesthetic process. In “Communication in Society,” Hugh Dalziel Duncan claims that the concept “consummation” has essentially the same meaning in the writings of Burke, Meade, and Dewey, and that it refers to a moment of finality at the end of an aesthetic process (417). Duncan sees consummation as a result rather than as a creative motive, which seems to go against Burke’s own description of where consummation fits in his critical vocabulary. In “A Dramatistic Theory of the Rhetoric of Movements,” Leland Griffin describes consummation as a stage in the life of a social movement and, therefore, talks about “consummation rhetoric” as containing specific traits. His description of rhetoric in the consummation stage is quite detailed and pulls together many of Burke’s thoughts on consummation, although he also sees consummation as a result rather than a motive.
These two main approaches to consummation, viewing it as a synonym for entelechy and perfection or relating it to Dewey’s aesthetic theory, seem to both be in use in modern publications on Burke. In his dissertation, “The Burkean Entelechy and the Apocalypse of John,” and in Implicit Rhetoric: Kenneth Burke’s Extension of Aristotle’s Concept of Entelechy, published in 1998, Stan A. Lindsay posits entelechy as Kenneth Burke’s most transcendent and most important term, and he analyzes the Revelation of John and the Branch Davidians at Waco to illustrate the mechanism of entelechy. In these two treatises, Lindsay mentions consummation only a few times, primarily as a synonym for the completion or fulfillment of an aesthetic process. In Kenneth Burke and the Conversation after Philosophy, published in 1999, Timothy V. Crusius sees consummation as being the fourth function of language. The first three are language as rhetoric, language as a “chart function” of realistic ambition, and language as self-expression (the dream function). Crusius writes, “After his initial treatment of symbolic action . . . Burke became interested in a fourth function of language, which he called ‘consummation’ that is, thoroughness, or the desire for ‘perfection,’ the drive to unfold to the last implication the meanings inherent in a given vocabulary” (73). However, he never distinguishes clearly between consummation, perfection, and entelechy. He talks about perfection as “a symbol-driven motive” and speaks of entelechy as a principle that leads to a “terministic compulsion” (170), which seems to conflate the concepts.
Most recently, Gregory Clark deals with consummation in Civic Jazz: American Music and Kenneth Burke on the Art of Getting Along. Of the two previously mentioned approaches, his treatment of consummation most closely mirrors the Dewey tradition. Clark sees consummation as a part of an aesthetic, communicative process where “separate identities dissolve into one, losing the differences that divide them in a felt experience of profound unity” (46). Thus, consummation is an aesthetic result, an “arrival at a destination where in our interactions no adjustment is needed for us to understand each other” (46). Clark believes that this is a state humans do not reach often, but that, as an experience, it maintains an aspiration and works as an ideal we are drawn towards (46, 134)6. I would argue that he is correct in his description of some of the social consequences of consummation, although his emphasis on the Dewey tradition does not give a very complete picture of how consummation is generated and sustained in terminologies.
Consummation in Kenneth Burke’s Theory
As is the case with many Burkean terms, consummation is perhaps best understood as a specific, defined link in a cluster of terms or a limb on a tree with significant contact points and areas of overlap with other terms and concepts. This does not mean that each individual concept lacks a meaning of its own, but it rather shows how Burke liked to think of things and how he tried to explain them. Burke describes his approach in A Rhetoric of Motives as follows: “Let us try again. (A direct hit is not likely here. The best one can do is to try different approaches towards the same center, whenever the opportunity offers)” (137). The result is often a myriad of explanations and terms to describe similar phenomena, and yet each different pathway touches on different aspects and different mechanisms. Though terms may be related, they are usually not interchangeable. In order to explain the relationship between consummation, entelechy, and perfection, I will first focus on consummation as an individual concept and then show how it operates with other terms in Burke’s critical vocabulary. The two main approaches Burke tried to get at consummation were the two texts “The Criticism of Criticism” and “Watchful of Hermetics to Be Strong in Hermeneutics.” In addition to these, there are brief references to consummation scattered throughout Burke’s last two essay collections, Language as Symbolic Action and On Human Nature, which seem to share a common concern for the relationship between consummation and agency. I believe these constitute a third approach to consummation. My treatment of consummation will follow these three approaches.
First Approach: “The Criticism of Criticism”
In “The Criticism of Criticism,” published in the autumn of 1955, Burke compares consummation with two philosophical and theological systems to explain the term.7 First, he compares his triad of self-expression, communication, and consummation with Saint Anselm’s triad of faith, understanding, and vision, calling his own three terms the “secular, aesthetic analogues” of Saint Anselm’s three theological stages: Faith equals self-expression, understanding equals communication, and vision equals consummation (245).8 In a secular, aesthetic sense then, consummation becomes analogous to the religious “vision” described by Saint Anselm. Although the terms are not exactly equivalent, we may reason that what Burke says about faith, understanding, and vision in this article will also hold true for or have a correlation with self-expression, communication, and consummation.
We learn from Burke that vision “transcends the ergotizing 9 ways of the understanding” (238) and is a kind of synthesis of both faith and understanding (239). The first (faith), is characterized by “energy” and “momentum” (242), and it is an “initiating intuitive power” (242). Intellectus (understanding) is a kind of intellectual frame that then strikes the imagination and can feed a “contemplation (or ‘vision’)” (243). For Saint Anselm, faith meant an active love of God that needed to then gain a deeper knowledge (understanding) of God. He writes in "Cur Deus Homo," “to my mind it appears a neglect if, after we are established in the faith, we do not seek to understand what we believe” (II). Faith is emotional, intuitive, almost instinctive,10 whereas understanding gives this emotional energy direction and structure. In “The Criticism of Criticism,” Burke criticizes R. P. Blackmur for seeing these two concepts as a dyad, with faith being able to question the intellect (understanding) and the intellect being able to curb faith. Burke claims that the goal for Saint Anselm was not that these should balance one another, but rather that the two together would transcend each other and lead to a vision or contemplation of God (238). A vision in this sense is a fusion of perfect faith and perfect understanding. More than merely seeing something, it is being able to grasp the essence of God, both intellectually and emotionally. It is in the vision or contemplation of God that intelligent nature finds its happiness or fulfillment (Anselm XVI).
To explain the analogous aesthetic triad, Burke writes that self-expression is the origin of art, with spontaneous utterances such as “outcries, oaths, interjection,” which are matured by translation into communication. Comparable to faith and understanding, self-expression is the initiating intuitive desire with energy and momentum, and communication is the matured realization of that desire. Just as with Saint Anselm’s triad, the two terms work towards a third: “the work of art moves towards the transcending of both self-expression and communication” (245). The way he describes the development towards this third stage is that an artist is motivated by self-expression, and then uses a public medium to transform it into a kind of communication, “but in the course of perfecting his work, he encounters possibilities purely internal to the medium; and he may exploit these possibilities ‘to the end of the line,’ regardless of either self-expression or communication” (245). Burke’s example is James Joyce’s later work, which he developed from a standpoint “of its ultimate possibilities” (245) even at the expense of clear communication. In so doing, Joyce answers a call (expresses himself), but the product is consummatory “in a way that could not be adequately confined to either of the first two stages, but would have something of both in being beyond both” (245). The artist is expressing and communicating, but he or she is also a discoverer on a journey or someone trying to complete a puzzle with the pieces available. The medium itself, meaning the language the artist uses or has developed for self-expression and communication, contains an inherent vision that the artist may pursue for its own sake.
In Personal Knowledge: Towards a Post-Critical Philosophy, Michael Polanyi gives us some examples of how people in scientific disciplines move from communication to consummation. Drawing on Saint Anselm’s theological triad, Polanyi tries to explain what motivates scientists to pursue their research in terms of a scientific vision. He claims that a scientist is “an intelligence which dwells wholly within an articulate structure of its own creation” (195). The structure may be “a theory,” “mathematical discovery,” or “a symphony,” but the principle is the same (195). It is only when the scientists surrender to the framework that they can gain a scientific vision. An astronomer reflects on the “theoretic vision” and experiences the “intellectual powers” of an astronomic theory, and a mathematician “loses himself in the contemplation” of the greatness of mathematics (195) in order neither to “observe or handle them, but to live in them” (196). The vision gained by scientific discovery is comparable to what he has termed the religious “ecstatic vision”:
Scientific discovery . . . bursts the bonds of disciplined thought in an intense if transient moment of heuristic vision. And while it is thus breaking out, the mind is for the moment directly experiencing its content rather than controlling it by the use of any pre-established modes of interpretation: it is overwhelmed by its own passionate activity. (196)
Polanyi sees intellectual passions, such as a desire for order, as the first step toward this vision. These passions then lead humans to articulate and construct frameworks that “handle experience on our behalf” (196), which are then again demolished as they are replaced by “more rigorous and comprehensive” frameworks until this process “culminates in the scientist.” The scientist has now acquired an articulate structure that can give her access to such a scientific vision, and this vision gives the scientist further direction and motivation. In this respect, Polanyi claims that science is just like art. Art “exerts to the utmost the artist’s powers of invention and discrimination merely for the purpose of satisfying the standards of appreciation which the artist has set for himself” (195), making artistic vision a self-sustaining motive. Here is a paradox that Polanyi claims is ‘inherent in all intellectual passions’: The human exerts itself to follow the dictates of a framework it has set up by itself. In Polanyi’s version of the triad, faith is intellectual passion, understanding can be a scientific theory, and the vision refers not to God but to intellectual power and beauty, which Polanyi claims are indicative of truth (135). The scientist gains this vision by what Polanyi describes as surrendering, yielding to, or contemplating the articulate structure he or she dwells within. This seems to describe a kind of aesthetic appreciation of the order or logical symmetry of an articulate structure, such as the way Bertrand Russell describes the study of mathematics: “Mathematics, rightly viewed, possesses not only truth, but supreme beauty. . . . The true spirit of delight, the exaltation, the sense of being more than Man, which is the touchstone of the highest excellence, is to be found in mathematics as surely as poetry” (Russell 31). Polanyi’s example shows us that Saint Anselm’s triad is recognized as a driver of human motives in secular as well as religious contexts.
After writing about Saint Anselm, Burke gives a second analogy to explain his triad of creative motives: the three-term system of cognition in Baruch Spinoza’s Ethics.11 The three terms are “(1) opinio, or imaginatio; (2) ratio;” and “(3) scientia intuitiva” (244). Spinoza writes of opinio or imaginatio that, “from the fact of having read or heard certain words we remember things and form certain ideas concerning them, similar to those through which we imagine things” (Spinoza). The connection with Burke’s self-expression is not completely clear, although one may say that to imagine or have an opinion displays a kind of faith in individual perception. Self-expression is the expression of individual imagination or opinion.
Of ratio he writes that it is “the fact that we have notions common to all men, and adequate ideas of the properties of things” (Spinoza). The common notions make it possible to check our initial perceptions and discuss them with others. To communicate is to make use of common notions to make others understand what we are trying to express. This may be how this step is related to Saint Anselm’s “understanding”: ratio is the level of thinking where we move beyond individual perception or faith and try to make it comprehensible and understandable to others also. The common notions and adequate ideas of, for example, the existence and proportions of things make this kind of communication possible.
Spinoza explains the third level, scientia intuitiva, as follows: “there is, as I will hereafter show, a third kind of knowledge, which we will call intuition. This kind of knowledge proceeds from an adequate idea of the absolute essence of certain attributes of God to the adequate knowledge of the essence of things” (Spinoza). There is some debate as to what Spinoza meant by this third term. The main idea seems to be that we can gain some kind of absolute understanding of or crucial insight into the Creator of all things, and as a result, we see things differently and are able to gain new knowledge. By seeing or understanding the One who is the essence of all things, we gain a derivative understanding about how the rest of the world must be.
Burke’s aesthetic analogue to God is the God-term, and his description of the perspective we gain through the God-term sounds similar to Spinoza’s scientia intuitiva: “Whereas before we were among varied worldly uses looking towards a single purpose, we are now in the realm of supernatural purpose looking down upon worldly multiplicity and seeing in it more strongly the new starting point at which we have arrived” (“Notes on ‘Nature’”). Anselm’s vision, Spinoza’s scientia intuitiva, and Burke’s consummation all name a totality, a grasp of life’s essence and diversity. By knowing God we also come to know all the things that God has created, and by grasping the God-term of a vocabulary we understand how the other words function in relation to it and each other. From these connections, consummation seems to be the grasping or creation of an essence, which then transforms all of our motivational vocabularies in its image.
Second Approach: “Watchful of Hermetics to Be Strong in Hermeneutics”
The second approach gives more details as to the origin of consummation as a creative motive and its relationship to Burke’s theory of form. During this approach, Burke also connects consummation to the great practical and political problems that occur as a result of scientific developments, such as the development of thermonuclear bombs. “Watchful of Hermetics to be Strong in Hermeneutics” is a selection of the unpublished manuscript Burke wrote called Poetics, Dramatistically Considered. The manuscript is an extended treatment of Aristotle’s Poetics and how Aristotle’s theory relates to Burke’s theory of form. In the manuscript, Burke gives his longest continuous treatment of consummation.12
It becomes clear in “Watchful of Hermetics to Be Strong in Hermeneutics” that consummation requires a rigorous, well-developed vocabulary in order to be a significant force. To explain how this force is generated and sustained, I will briefly discuss Kenneth Burke’s theory of form, which he laid out in Counter-Statement, and show how consummation relates to it. For Kenneth Burke, form is the arousing and fulfilling of desires or expectations in the audience or reader (124). A story arouses and fulfills desires through a narrative, but any other text or vocabulary does the same: a textbook introduction creates expectations for what the book will discuss and how it will discuss it, a legal opinion cites laws and precedent cases that set up the usually expected conclusion, and the vocabularies of the natural sciences train us to expect mechanisms in the natural world rather than agents, and as such set up expectations for the discovery of more mechanisms.
Burke claims there are four aspects of form: progressive form (subdivided into syllogistic and qualitative progression), repetitive form, conventional form, and minor or incidental forms” (Counter-Statement 124). The kind of literary form that best explains consummation is “syllogistic progression.” 13 Burke writes that, “We call it syllogistic because, given certain things, certain things must follow, the premises forcing the conclusion” (Counter-Statement 124). This aspect of form is created and maintained by structures of language that direct desires and expectations towards certain developments. The first act of the play sets up the conflict and the conflict sets up the resolution. For Burke, the same applies to any text or group vocabulary. Any definition of the world at the same time sets the stage for the drama of benevolent and malevolent forces, or the thou shalt and thou shalt not (Religion 279). 14 (I shall hereafter group all genres that use language under the general term vocabularies, since Burke claims every text makes its own vocabulary in the sense that it will give terms different nuances of meaning than those you will find in a normal dictionary (Philosophy 35)). Form thus creates a structure of requirements and directives that make both the endings in stories and the developments in group vocabularies somewhat predictable. Burke writes, “If the beginning of a work is viewed as setting up potentialities which are fulfilled at later stages in the work, in this sense the beginning can be thought of as matter that is subsequently actualized. The beginning, we might say, has ‘the makings’ of the ending” (“Watchful” 45). In the same way, one may say that the seeds for a vision or consummation are evident already in the first intellectual understanding or framing of the faith or self-expression.
I will now proceed to discuss Burke’s explanation of consummation in “Watchful of Hermetics to be Strong in Hermeneutics”. Syllogistic progression makes it possible for a vocabulary to take on a life of its own, in the way Burke indicates. The aesthetic principle that supports this autonomy is the requirement for consistency: “The principle of unity implies the fulfilling of expectations, for if a work violated expectations it would not be considered consistent” (47). The requirement of consistency may seem like a feeble motivation until one considers the great moral, scientific, and mathematical systems in the world that rely primarily upon consistency for legitimacy. 15 Burke writes that “consummation, obtained by exploiting the possibilities of a symbol-system as such, without primary regard for either self-expression or communication, may be better explained in terms of self-consistency than expectation, though the two imply each other” (49).
Burke’s general description of form is “the arousing and fulfilling of desires” or expectations (Counter-Statement 124), but when a writer or an audience is following a structure of expectations that has already been set up, one merely has to be consistent to achieve or experience literary form. As Burke writes, the two imply each other, and yet one can be primary while the other is secondary. It may be helpful to think of a continuum where expectation and self-consistency are at each end. At the beginning, a vocabulary starts arousing and fulfilling expectations, with self-consistency playing a relatively minor role simply because there is very little material for the new developments to be consistent with. As this text or vocabulary develops, the readers or participants have soon learned “the rules” well enough that they can anticipate the next developments even without having been given specific clues. At this level, self-consistency becomes the more dominant principle. On the far end of this continuum one may find systems such as mathematics or formal logic, where self-consistency becomes the primary and almost exclusive expectation for learned practitioners. Consummation, it seems, can only be an active principle in a vocabulary or system that has developed enough rules to require it to be self-consistent in order to maintain the aesthetic principle of unity.
Once a vocabulary or symbol-system has reached this level, it tends to “become a guiding principle in itself” (Counter-Statement 157) and can “appeal independently of its functional uses” (Counter-Statement 145). In “Watchful,” Burke warns that, “This formal principle of consummatory self-consistency is important when we consider technological developments as the possible manifestation of ‘aesthetic’ motives rather than as instruments of sheer pragmatic utility” (49). This is where consummation goes beyond being simply aesthetic theory. Kenneth Burke argues that this aesthetic principle of consummation, this desire for consistency, can lead a person or group of people to desire results that are devastating to humanity in general in order to satisfy an aesthetic craving. Thus, he claims, “In this regard, the various scientific specialists are to be viewed as carrying out the implications of their terminologies, and thereby seeking technological consummation for its own sake, however deceptively their efforts might be justified” (49).
One historical example of this motive could be the reaction of the young scientists at Los Alamos when the 1949 GAC report 16 advised against development of the hydrogen bomb. In The Legacy of Hiroshima, Edward Teller and Allen Brown write:
It [the GAC report] seemed to restrict the Los Alamos scientists to minor improvements in the old field of fission. But many of the scientists, especially the younger men, found it difficult to control an adventurous spirit urging them to get into the newer field of thermonuclear reactions. The GAC report seemed to state the conflict rather bluntly: As long as you people work very hard and diligently to make a better atomic bomb, you are doing a fine job; but if you succeed in making real progress toward another kind of nuclear explosion, you are doing something immoral. To this, the scientists reacted psychologically. They got mad. And their attention was turned toward the thermonuclear bomb, not away from it. (45; emphasis added)
Teller and Brown later credit this “scientific anger” with helping to propel the USA towards development of the hydrogen bomb (45). Remarkably absent from Teller’s description of their reaction is any kind of discussion of politics or morals related to the hydrogen bomb. The motivating factor among the young scientists seems to have been success and “real progress” in the “newer field of thermonuclear reactions” or, as Burke would say, seeking technological consummation for its own sake.
The specific example Burke gives of such motives is very likely a direct response to a text written by Edward Teller. In 1957, when Teller, along with Ernest O. Lawrence, tried to convince President Eisenhower not to sign a nuclear test ban treaty with the Soviet Union, their main argument was that they would be able very soon to develop “clean thermonuclear weapons” that would be of almost unlimited benefit to humankind (Magraw 32). The following year, Teller and Albert Latter wrote an article in LIFE Magazine titled “The Compelling Need for Nuclear Tests” in which the possibility of clean thermonuclear weapons again featured as a main argument. 17 It seems plausible that this is what Kenneth Burke is responding to in “Watchful of Hermetics to Be Strong in Hermeneutics.” Burke writes, “For instance, whether or not it is possible to develop ‘clean’ thermonuclear bombs, some men might well want to go on experimenting with these dismal weapons. For they have brought their calculations to the point where further experimental steps are in order, steps suggested by the present state of their terminologies” (49). 18 Studying the example of consummation Burke was referring to may help to illustrate some of the principles of consummation that he is describing.
Concerning Teller’s arguments, Magraw writes that “[a] consistent theme in the arguments for the development of the clean bomb and against a test ban was that it was positively un-American to believe that there are limits to what technology can achieve, or that one might want to impose such limits” (35). In addition to this, Teller argues that it is in a way anti-science to do so. Following Teller’s logic, there seems to be no other logical solution than continuing testing for the next 100 years. The essence of the argument is in the conclusion of the article, where Teller and Latter imply that if one opposes nuclear tests, then, by definition, one opposes science and humanity’s great endeavor to control nature:
The spectacular developments of the last centuries, in science, in technology and in our own everyday life, have been produced by a spirit of adventure, by a fearless exploration of the unknown. When we talk about nuclear tests, we have in mind not only military preparedness but also the execution of experiments which will give us more insight into the forces of nature. Such insight has led and will lead to new possibilities of controlling nature. There are many specific political and military reasons why such experiments should not be abandoned. There also exists this very general reason—the tradition of exploring the unknown. It is possible to follow this tradition without running any serious risk that radioactivity, carelessly dispersed, will interfere with human life. (Teller and Latter 72)Teller states that all kinds of progress have been achieved by “a spirit of adventure” and “fearless exploration of the unknown,” describing primarily attitudes that he later terms “a tradition for exploring the unknown.” He then identifies this source of all progress with nuclear tests, which give us insight into and power over nature, and claims that it would be inconsistent to abandon an approach that has given us so much progress. Progress here is equated with controlling nature.
In The Legacy of Hiroshima Teller gives us a vision of how thermonuclear weapons could be used to control nature: using H-bombs to blast channels, tunnels, harbors, and coal mines (84-5); to “frack” for oil (87); to blast the Canadian tar sands and distill oil (88); to make diamonds (89); to mutate plants for our benefit (115); to cultivate the oceans by killing off species that have no value as human food (93-4); and to finally make it possible for humans to leave Earth and colonize space (125, 133, 140).
According to Burke’s reading, some of these reasons would be rationalizations to justify work on weapons of war, but Burke also believes that they, at least at times, genuinely reflect a terminology that almost compels these scientists to continue onwards in the same direction. Teller openly admits that the final goal here is not victory over the Soviet Union or even peace, but rather “increasing man’s control over nature.” 19 Teller had pursued and perfected the hydrogen bomb for over 20 years by the time he published his book. Reading his version of the history, one almost gets the impression of an addict. Teller writes that, for him, talent in science or mathematics is an addiction, a love (160) and that “the force of inner necessity” (not motivated by utility or any external circumstance) is “the greatest power on the earth” (163). It seems to be this power that drives him to pursue the hydrogen bomb in times of both war and peace, and to label people as allies or opponents based on the help or hindrance they provide towards that goal.20
In “Watchful,” Burke treats this kind of addiction or compulsion as the result of an aesthetic principle: “the ‘principle of consummatory self-consistency’ would provide an incentive, or almost a compulsion, to continue in this same direction, quite as an author who had carried a novel to near completion might not be able to rest until he had finished it” (49). Although this may be a particularly powerful drive in the case of Teller or in the field of thermonuclear reactions in general, Burke claims that this drive is common for all fields of science: “The principle is the same. Each scientific specialization has its own particular idiom, making for its particular idiocy, in line with its particular possibilities of communication” (49). Note that it is the medium of communication, in most cases a professional vocabulary, which sets the terms for the potentialities available within a scientific specialization. The rigorous vocabularies of the scientific disciplines make them conducive to the aesthetic appeal of self-consistency and hence to the creative motive of consummation. Burke calls consummation “an autonomous formal principle” (“Watchful” 49), and both Polanyi and Kuhn agree that similar aesthetic principles play a large role in the developments within the natural sciences. 21 These sciences, Burke claims, are all developing towards aims determined by their professional vocabulary rather than any shared notion of the “common good” for mankind. Burke concludes his discussion of consummation with a broader view of the effects of these autonomous formal principles in operation all around us:
A clutter of such autonomous formal principles, each aiming at its own kind of perfection, can add up to a condition of considerable disarray—and especially insofar as many of the new powers thus being developed lend themselves readily to destructive purposes while even their ‘peaceful’ uses are menacing, as with the pollution that goes with the disposal of atomic wastes. Yes, the ‘aesthetics’ of recent technological consummations can become quite ugly. (49-50)
Here Burke ironically observes how the aesthetic desires of a range of scientific specialists create a markedly aesthetically unappealing world. Their desire for beauty leads to a hideous reality. He uses the word “perfection” to describe what these consummations or “autonomous formal principles” are aiming at, but makes it clear that the autonomous formal principle is not the same as perfection. I will discuss the relationship between perfection, entelechy, and consummation in the concluding section of this paper.
So what have we learned from the second approach to consummation? Consummation is an autonomous formal principle sustained by the aesthetic requirement for self-consistency. In order for self-consistency to become the dominant motivation, one needs an extensive vocabulary that is also rigorous, meaning that it has set up a wide range of rules for self-consistency that it follows consistently. The terminologies of different scientific specializations are examples of such extensive and rigorous vocabularies, and Burke mentioned the field of thermonuclear physics as one field where the principle of consummation was a significant factor.
Third Approach: Various Texts Written 1960-1993
Kenneth Burke often found it useful to separate between action and motion, where action infers an active consciousness that makes choices, and motion does not require consciousness or choices, exemplified in such mechanisms as the body’s ability to breathe (Religion 41). So far, based on the texts written in the 1950s, Burke’s explanations of consummation seem to reduce human agency to mere motion; indeed, he writes about this period that “[e]xperimentally, I often turn the usual perspective around, and think not of us as using language but of language as using us to get itself said” (22 April 1958; Jay, Correspondence 332).22 He writes, “To a large extent, I am sure, we are simply like a telephone exchange run by an automatic dialing system. Things go in and out of us much as though we were the coordinating center that didn’t even know what was being said” (Correspondence 332). As he works further on the concept of consummation, however, he seems to moderate this view and shows consummation as a complex interaction between action and motion, and between conscious and unconscious symbol-using. This approach comes at the end of Burke’s published work in The Rhetoric of Religion (1961), Language as Symbolic Action (1966), and essays gathered in the collected edition On Human Nature: A Gathering While Everything Flows 1967-1984. This is also where he theorizes ways in which this creative motive can be diffused or at least made less harmful. I will first show the potential cures or correctives Burke suggested for consummation, and then apply this in a discussion about the extent and the possibility consummation leaves for choice or action.
In The Rhetoric of Religion, Kenneth Burke uses the Bible as an example of a vocabulary that is capable of sustaining the creative motive of consummation. The cyclical chart of terms for Order that he finds through his analysis of the Bible “sums up the ‘directionless’ way in which such a cluster of terms imply one another” (4).23 The goal of the book is to develop a critical metalinguistic vocabulary (logology) that can make us aware of such persuasive structures in other non-religious vocabularies, such as the metaphysics of empire, technologism24, and scientism (170, 302). This implies that people can learn to question the consummatory drive if they become aware of it and have a critical vocabulary they can use to analyze it (301).
In Language as Symbolic Action, Burke seems to suggest a sort of competitive check on consummation:
Whereas there seems to be no principle of control intrinsic to the ideal of carrying out any such set of possibilities to its “perfect” conclusion, and whereas all sorts of people are variously goaded to track down their particular sets of terministically directed insights, there is at least the fact that the schemes get in one another’s way, thus being to some extent checked by rivalry one with another. (19-20)
The principle seems to be that a plurality of voices or at least the lack of univocality can constrain the negative impacts of consummation. Moves towards debate, inclusion, and interdisciplinarity may help to check consummation in specialized vocabularies.25
Finally, in On Human Nature: A Gathering While Everything Flows, Kenneth Burke describes the consummatory drive as a kind of autosuggestion, and he suggests a potential cure: “Might the best protection against the dangers of autosuggestion be in the development of methods designed to maintain maximum liquidity in all symbolic exercising?” (50). Aristotle’s Rhetoric is one example he gives of tools that can help us maintain such liquidity. If consummation requires a rigorous and disciplined vocabulary, symbolic liquidity could help to loosen the chains of formal syllogistic progression that make consummation possible.26 He recounts how he himself as an author became the victim of autosuggestion and was only able to free himself from it by criticism (49), and he seems to think that the same cure could help other people in the same way. Later, he suggests satire as a method of popularizing criticism of rigorous vocabularies by taking the demand for self-consistency to an excess and thereby showing its absurdity (73).
These opportunities for correction suggest that consummation is not ineluctable, despite Crusius’s claim to the contrary (Crusius 73). Even though Burke played with turning around the concept of people using language to language using people, he never claimed that it is false that people can and do use language. Because consummation is a motive that requires a rigorous vocabulary, it is as subject to criticism and capable of correction as the vocabulary it relies on. By debate it can be dissipated, by maintaining symbolic liquidity it can be destabilized, and by logology and satire it can be analyzed, criticized, and defused. Consummation seems to only be a danger when people are not aware of it, when the vocabulary is shielded from debate, or when the proponents of the vocabulary actively choose to disregard the danger.
How, then, should we conceptualize the extent or possibility for active choice for people driven by consummation? Self-consistency is an aesthetic desire; a sense for what is appropriate or beautiful, and yet it can become a “trained incapacity” to the extent that it becomes hard for someone habituated to that kind of thinking to think differently. It may be useful to use Burke’s phrase that “The driver drives the car, but the traffic drives the driver” (Human 71). People driven by consummatory self-consistency act, think, and make conscious decisions, but they do so within a framework defined by their vocabulary. For example, rather than considering whether or not it is good or even useful to “increase man’s control over nature” in the form of thermonuclear weapons, someone who buys into Teller’s scientific vision would simply ask “how can I best increase man’s control over nature.” The scientist thinks and makes choices, but the terminology determines the range of thoughts and choices available or acceptable to him or her.
To give a specific example, in “Physics in the Contemporary World,” Robert Oppenheimer dismisses the claim that scientists are responsible to society for the results of their discoveries. Instead, he argues, “The true responsibility of a scientist, as we all know, is to the integrity and vigor of his science” (67). Oppenheimer goes on to discuss what a scientist should and should not consider: “Science is disciplined in its rejection of questions that cannot be answered” (86), by which he means any question that cannot be answered by empirical measurements or mathematical proof. A person that has adapted such a way of thinking by commitment and habituation may feel more compelled by, and less able or willing to resist, the consummatory drive for self-consistency within that vocabulary. Although Kenneth Burke describes the drive at times as a compulsion, he uses words of action to describe people following it. For example, in Language as Symbolic Action, he writes:
A given terminology contains various implications, and there is a corresponding perfectionist tendency for men to attempt to carry out those implications. Thus, each of our scientific nomenclatures suggests its own special range of possible developments, with specialists vowed to carry out these terministic possibilities to the extent of their personal ability and technical resources. (19, emphasis added)The terminology suggests potential developments, but it is people that fulfill them because of their commitments and their desires. It is possible to reject the urge for completion, just as an author can refuse to finish a book or a listener can turn off a song before it has ended.
Burke compares this terministic compulsion to an astronomer who, through calculations and observations, predicts that an asteroid will soon hit Earth and destroy all life on it. “He would . . . feel compelled to argue for the correctness of his computations, despite the ominousness of the outcome” (19), not because awareness could in any way avoid the disaster, but because it is the answer that fits. The difference is that, in bioengineering or nuclear physics, following caluclations to the end of the line is what creates the ominous outcome. The potentiality may be latent in nature, but cloning and nuclear weapons do not just materialize from potentialities in nature; people choose to uncover and develop these potentialities. When James Joyce or Beethoven follow the implications of their symbol-systems, they can choose not to complete that journey, although it may feel gratifying and right to do so (305). Burke writes that artists or speculative minds can feel like “there is no rest” once they have glimpsed certain ultimate possibilities until they have “transformed its potentialities into total actualization” (Human 73). The person who glimpses the possibilities is “called” and is under “a kind of compulsion” to pursue those possibilities (Human 74), but it is possible to avoid heeding that call.
In terms of the action/motion duality, it seems that people who have been “under the spell” of such a consummatory drive feel they are less free to act.27 The level of agency and ability to act in opposition to the consummatory drive may be highest before one commits to a specialized vocabulary of a science, academic field, ideology, or religion, although it is questionable whether humans can operate without any such terminologies. Still, there is a great difference between the rigorous vocabulary of positivistic science and the playful vocabulary of an omnivorous reader of world literature,28 and they are not equally capable of generating expectations of self-consistency.
Conclusion: Entelechy, Perfection, and Consummation
As mentioned earlier, some Burke scholars tend to see consummation, perfection, and entelechy as identical, and there are some passages in Burke’s writings that could justify such an interpretation, and I will discuss them. However, I will make the argument that consummation should be seen as a separate term with a separate meaning.
In On Human Nature, Kenneth Burke discusses his thoughts on the third creative motive (consummation), which arose from speculations in the late 1930s, and then writes: “Later I began to ask myself whether I could round out this notion of a purely formal motive (or goad, implicit in our nomenclatures) by adapting for my purposes the Aristotelian concept of entelechy” (74). He goes on to explain that whereas Aristotle applied the term to explain biology, physics, and almost every development in nature and society, Burke only applies it to symbolic action. Different verbal structures are “illustrative, in their different ways, of the entelechial principle, tracking down the implications of a position, going to the end of the line” (74). One reading of this passage could be that Burke replaces consummation with entelechy since he realizes what he is talking about is basically a symbolic version of what Aristotle discussed in his writings on biology and physics.
The essay the quote is taken from, “Why Satire, With a Plan for Writing One,” was written in 1974, which definitely sets its date after his previous discussions of consummation. Although he discusses a third creative motive in the same article, he does not use the term “consummation,” which could justify the interpretation that entelechy simply became the new consummation. In fact, I have not been able to find an article where he uses the word “consummation” after 1967, when he uses it in both “A Theory of Terminology” (Human 244) and “Curriculum Criticum,” the afterword to the 1968 edition of Counter-Statement (225).29 However, it is not as if entelechy is a new invention in the Burkean vocabulary in 1974. He used the term actively in his criticism since at least 1952 (in “A ‘Dramatistic’ View of ‘Imitation’”) at the same time as he was writing about consummation as a separate term with a separate meaning. 30
I would argue that the concepts of consummation and entelechy, though related, are not the same. Entelechy is the “rounding out” of consummation in the sense that Burke takes a specific category of creative motive and shows that it is just one example of a general tendency within all symbol-using. I would argue that consummation is a specific manifestation of the entelechial principle, but that not every manifestation of entelechy is consummation. In this sense, they operate together in a cluster where entelechy is the greater summarizing term and consummation is the more limited and restricted term.
So what exactly is entelechy? In his introduction to “Archetype and Entelechy,” Rueckert writes that Burke borrowed the term entelechy from Aristotle, applied it to literary texts, and later “he expanded its application so that it applied to all symbolic action and became one of the prime functions of language and central concepts of logology” (Human 121). Rueckert’s explanation of entelechy is that “[l]anguage, or, perhaps, just the human mind, seeks perfection, is compelled to go to the ‘end of the line’ in its many endeavours” (Human 121). If we accept Rueckert’s definition, then it seems clear that entelechy is more expansive than consummation. The passages on consummation previously referred to all seem to require an established and preferably specialized vocabulary in order for consummation to be a factor, whereas entelechy applies to all symbolic actions and is one of the prime functions of language itself. To give an analogy: If entelechy is the general tendency humans have to get sick, then consummation is a particular class of diseases that can afflict them. This does conflict with Star Muir’s definition of entelechy as “the tracking down of implications within a particular vocabulary” (21st Century 36), although I would agree that what Muir is describing is one manifestation of the entelechial motive.
So how does entelechy relate to perfection? Are they the same for Burke? In “Archetype and Entelechy,” Burke defines entelechy as “such use of symbolic resources that potentialities can be said to attain their perfect fulfillment” (Human 125), with perfect victimage being one example. Other examples are the perfect villain, the perfect fool, the Nazi version of the Jew as the perfect enemy, and the perfect Communist (Human 126). These examples of entelechy seem to show that entelechy is a general tendency to take a concept, image, or principle to its extreme. For example, labeling someone as vicious or evil and taking that to its extreme might lead anyone defined as “good” to kill or conquer that person, whereas labeling someone as mistaken would direct good people to try to correct or persuade him or her (Attitudes 41). In the same way, Burke labels Freud’s myth of “the fatherkill” as entelechial in the sense that, although it may never have really happened, it is a “perfect representative expression of the tensions he viewed as intrinsic to the family structure” (Human 127). The fatherkill is the entelechy of the Oedipus complex. It is the fruition or culmination of a struggle or tension taken to its furthest extent. Unlike the descriptions of consummation, there is no qualification that this motive requires a highly developed vocabulary or that this form operates primarily through self-consistency rather than by the arousing and fulfilling of new expectations.
In order to understand entelechy, this drive towards the perfection of a concept, image, or principle, we have to understand what Kenneth Burke means by perfection. In “Theology and Logology,” he writes that perfection is the secular or logological analogue of the “idea of God as the ens perfectissimum” (Human 177) (most perfect being or conjunction of all perfections), but that Burke’s concept of perfection does not require that the perfection be positive, only that it be the ultimate of its kind. One example is how we may impute terrible motives to our opponents until they are little less than the pure embodiment of evil (such as one sees in war propaganda). By so doing, we “perfect” the idea of our opponents until they are the most loathsome enemy we could possibly imagine. This perfection of the enemy is what Burke would call an entelechy, a manifestation of the entelechial motive taken to its ultimate form. This seems to fit well with Bryan Hubbard’s definition of entelechy as the drive towards perfection. Entelechy is the drive and perfection is the goal that inspires the drive, comparable to how, in theology, piety is a yearning for God and a perfect God is the center or locus that makes such a drive possible. Burke describes the secular grounds for this drive as a formal obligation: “Discourse can be truly discourse only by having the power to be fully itself. Such a formal obligation applies always” (Religion 289).
To summarize the relationship between the three concepts, entelechy is a general drive towards perfection. Perfection is a goal or ideal fueled by a “formal obligation” for a discourse, concept, or principle to “be fully itself” which means to actualize inherent potentialities to its fullest degree (such as “perfecting” the enemy). Consummation is one manifestation of the entelechial drive, where a vocabulary sustains a drive towards a particular kind of perfection. The perfection the consummatory terminology is driving towards is most likely symbolized by a God-term. Unlike some other manifestations of the entelechial drive (such as creating “the perfect enemy” or “the perfect bread”), consummation requires an extensive terminology to be a significant motive. Self-expression and communication must first create utterance and structure before consummation can arise as an active motive, just as faith and understanding precede vision in Saint Anselm’s theology. The terminology must also be rigorous enough to allow self-consistency to become the dominant form and give rise to this autonomous formal principle.
So what does the concept of consummation add to Burke’s corpus of critical terms? First of all, it adds precision. Instead of just describing the existence of a general principle, consummation describes a motive which only arises at a specific stage in a dialectic between self-expression and communication. It gives a clearer description of how the general entelechial principle is developed and sustained in specialized vocabularies. Second, it adds understanding of a specific mode of persuasion that may be the source of some of the greatest problems we have in the world today, and just as vision transcends the ergotizing ways of understanding, so consummation may elude many of our normal filters for detecting and analyzing arguments. This rhetoric operates through self-consistency rather than expectation, and as such it may seem inevitable or unproblematic and therefore it is not subjected to criticism. Kenneth Burke warns us of the specific dangers of consummation in specialized vocabularies and directs us to study these vocabularies carefully for implications of future developments. Finally, this is a specific manifestation of the entelechial principle which requires a terminology in order to function as a motive, and it is therefore capable of criticism and correction through the remedies suggested by Kenneth Burke.
Based on these and the previous arguments, I maintain that consummation deserves to be considered independently of entelechy and perfection as an important term in Burke’s critical vocabulary. It is my belief that Kenneth Burke intended for it to be considered in that way. But, as Burke often said, “we may settle for less.” In either case, I argue that this concept of consummation is useful for Burke scholars and rhetoricians to distinguish an important manifestation of the entelechial drive.
Notes
1. Burke refers to such a shift in a letter to Cowley written 9th of August 1945: “I may end up where I began: with Flaubert” (Jay 268). He also mentions in “Curriculum Criticum” (in 1967) that he has added an explicit concern with consummation in his later works.
2. Rueckert writes that the essays in Part One “(and others in the collection)” are warnings about taking the development of terminologies (science and technology) “to the end of the line” (4). Although this also relates to entelechy and perfection, Burke specifically describes a motive of “tracking down implications of a terminology,” which I argue is the definition of consummation, over thirty times throughout the collection.
3. Burke’s concept of self-expression is universal and not limited to artists. People can, for example, express themselves by living or acting out the occupation or social class they belong to.
4. When asked to clarify this quote, Wess wrote in an email dated 19 November 2015: “The key word in the paragraph you quote from is ‘cluster.’ Terms in a cluster are synonyms in a Burkean sense, which is a bit different from the conventional meaning of ‘synonym.’ Broadening the context, I would say that Burke was always especially interested in action undertaken for its own sake rather than as a means to something else. Over the years, he theorized such action is a number of ways that are different but that also may be ‘clustered’ together.”
5. At least, his definition and description of entelechy match that of consummation in «Curriculum Criticum» and other texts.
6. There is no necessary contradiction between Clark’s concept of the social consequences consummation can have and my explanation of the term, although his book focuses more on the positive effects and my article focuses more on the dangers consummation entails.
7. The text is a review of The Lion and the Honeycomb by R.P. Blackmur. Kenneth Burke starts by critiquing Blackmur’s criticism of rhetoric and then goes on to digress on Saint Anselm and explains consummation in terms of Saint Anselm’s triad.
8. Burke connected the terms with the symbol =, which I transcribe as “equals.”
9. To ergotize is to argue logically or sophistically. Burke seems to imply that “vision” operates on a different plane than understanding and convinces us in a different way.
10. Faith is primary for Saint Anselm and does not require understanding. As he writes, “Were I unable in any way to understand what I believe, still nothing could shake my constancy” (II).
11. He gives it as an example of a triad structure and does not explicitly link it to consummation, but considering the proximity in the passage there is good reason to think that Burke at least viewed Spinoza’s triad as indicative of his aesthetic triad.
12. According to David Cratis Williams, the section on consummation was most likely written “in part” during 1951-2 “with the remaining . . . most likely written during Burke’s stay at the Center for Advanced Study at Stanford in 1957-58” (Williams 23), so temporally it was probably written both before and after “The Criticism of Criticism.”
13. Syllogistic progression has most to do with structures of language that direct our desires in a certain way and make a certain outcome almost inevitable. Qualitative progression has more to do with moods and states of mind that feel appropriate in sequence (the calm before the storm, etc.). Repetitive form is created by consistently repeating one principle while changing the guises it appears in, making the reader to expect further revelations of the same principle. Conventional form has to do with what we could call genre conventions, where we come to a play with certain expectations of that genre. The expectation is aroused before one experiences the content. Minor forms are such as metaphor, paradox, and other smaller forms that operate in any given text, without a necessary connection to the overarching form of the text. All these aspects will at times overlap and at times conflict in a text (Counter-Statement 124-8).
14. In Rhetoric of Religion Burke writes, “And implicit in their supposedly objective versions of what is and is not, they will have concealed a set of shall’s and shall not’s which they will proceed methodically to discover” (279).
15. In positivism, math and logic only have legitimacy because they are self-consistent tautologies, and any inconsistency would immediately doom both as nonsense (Ayer 10); similarly, Perelman claims that consistency helps to give a law legitimacy among the public (Perelman 62).
16. General Advisory Committee for the United States Atomic Energy Commission.
17. Over 50 years later, the military is still no closer to this elusive goal that Teller once described as merely a couple of years away (Magraw 34).
18. As mentioned before, this text was most likely written “in part” during 1951-2 and the rest written during Burke’s stay at the Center for Advanced Study at Stanford from 1957 to 1958 (Williams 23). Considering that Burke is describing “clean thermonuclear weapons,” it has to at least be after the advent of thermonuclear weapons in 1952. In addition, Katherine Magraw writes in “Teller and the ‘Clean Bomb’ Episode” that it was first in 1957 that “clean bombs” were discussed with the president (32) and that it was not discussed much publicly until February 1958, when Edward Teller and Albert Latter advocated for them in the LIFE magazine article. Probably, Burke wrote this text in 1958, making it likely that he is responding to Edward Teller and his justification for continued nuclear tests.
19. Teller sees this as an almost automatic mechanism: «Science brings progress; progress creates power» (93).
20. Teller sees the rejection of work on the H-bomb as almost a betrayal, and details the betrayal of Oppenheimer (41), Fermi, Rabi, and others (43-4). On the other hand, Ernest Lawrence (who was in favor of the H-bomb) is given a moving eulogy as “the best defender of our cause” and one who “sacrificed his life for science and for his country” (73).
21. Kuhn and Polanyi agree that scientists are motivated by a sense for order, consistency, and beauty in both their work and in their support of paradigms or theories. See Kuhn (154-5); Polanyi (13-4). Robert Oppenheimer claims that one of the main virtues of science and scientific life is its beauty (Oppenheimer 86).
22. This was in a letter to Malcolm Cowley written from the Center for Advanced Study at Stanford. As mentioned before, this was when he was writing “Watchful,” so it is likely that these are thoughts related to consummation.
23. Burke lists a chart of religious terms that can be viewed as logically dependent on and logical consequences of the idea of order. If there is order, then there is also potential for disorder, hence there is a law and a potential to either disobey or obey it. The whole cluster of terms ranges from Heaven to Hell with all of the terms seemingly logically dependent on each other. Thus, you are never “outside” of the larger order built on the terms implicit in the idea of order. Whatever choice you make, there is a description for it and a remedy assigned to that behavior.
24. A set of beliefs built upon the assumption that “the remedy for the problems arising from technology is to be sought in the development of ever more and more technology” (Human 133).
25. Although positivism, which was envisioned as the greatest hope for interdisciplinarity and unification among the sciences, became perhaps one of the greatest promoters of univocality and stifled dissent. So interdisciplinarity does not necessarily mean a plurality of voices.
26. Because Burke does not here explain what he means by symbolic liquidity, one can only make a guess based on the context of what he says and the content of Aristotle’s Rhetoric. My guess is that he believed that cultivating “an ability, in each case, to see the available means of persuasion” (1.2.1), would help people size up a situation in a lot of different ways, thereby avoiding too narrow views of a situation or an argument.
27. Robert Wilson describes that it was as though they had been programmed to finish the bomb and Frank Oppenheimer mentions being trapped by the machinery and momentum. Both are descriptions of limited agency (Trinity)
28. Kuhn writes that broad exposure to competing and incommensurable solutions is what distinguishes a student in the humanities or social sciences from a student in the natural sciences. This makes a natural scientist less prepared to handle paradigm crises and discover a fresh approach to answering the questions of his or her field (164-5).
29. In “'Always Keep Watching for Terms': Visits with Kenneth Burke, 1989-1990," edited by William Cahill, Kenneth Burke is still referring to three creative motives. In this interview he refers to the third motive as follows: "When you get to the third stage, it’s just fulfilling, you see, you finally get—what I decided to call it is the technical equivalent of inspiration, technological inspiration. You see, you’re really inspired when your vocabulary takes over. You start using words and words finally get you going and then the thing comes to life."
30. Burke writes that, "Since circa 1955, I have felt impelled to round out theories of 'self-expression' and 'communication' with a third term, 'consummation'" and states that consummation "essentially involves matters to do with 'tracking down the possibilities implicit in a given terminology" (Language 486).
Works Cited
Anselm. “Cur Deus Homo.” Medieval Sourcebook: Anselm (1033-1109). Internet History Sourcebook Project. Ed. Paul Halsall. Fordham University. 11 Dec 2015. Web. 31 Dec 2015.
Brock, Bernard L., ed. Kenneth Burke in the 21st Century. New York: State U of New York P, 1998. Print.
Brummett, Barry. “Perfection and the Bomb: Nuclear Weapons, Teleology, and Motives.” Journal of Communication. 39.4. (1989): 85-95. Print.
Burke, Kenneth. A Grammar of Motives. Berkeley: U of California P, 1969. Print.
—. A Rhetoric of Motives. Berkeley: U of California P, 1969. Print.
—. Attitudes Toward History. 3rd ed. Berkeley: U of California P, 1984. Print.
—. “Archetype and Entelechy.” On Human Nature: A Gathering While Everything Flows. Eds. William H. Rueckert and Angelo Bonadonna. Berkeley: U of California P, 2003. Print.
—. Counter-Statement. 2nd ed. Berkeley: U of California P, 1968. Print.
—. “Dramatic Form—And: ‘Tracking Down Implications.’” The Tulane Drama Review. 10.4. (1966): 54-63. Print.
—. Essays Toward A Symbolic of Motives, 1950-1955. Ed. William H. Rueckert. West Lafayette, IN: Parlor P, 2007. Print.
—. Equipment for Living: The Literary Reviews of Kenneth Burke. Eds Nathaniel A. Rivers and Ryan P. Weber. West Lafayette, IN: Parlor, 2010. Print.
—. “I, Eye, Ay: Emerson’s Early Essay on ‘Nature’: Thought on the Machinery of Transcendence.” The Sewanee Review 74.4 (1966): 875-95. Print.
—. Language as Symbolic Action: Essays on Life, Literature, and Method. Berkeley: U of California P, 1968. Print.
—. “Notes on Emerson’s ‘Nature.’” N.d. TS. Kenneth Burke Papers. Paterno Library, Pennsylvania State University, University Park, PA.
—. On Human Nature: A Gathering While Everything Flows. Eds. William H. Rueckert and Angelo Bonadonna. Berkeley: U of California P, 2003. Print.
—. “The Criticism of Criticism.” In Rivers and Weber. 228-45.
—. The Philosophy of Literary Form: Studies in Symbolic Action. 3rd ed. Berkeley: U of California P. 1973. Print.
—. “The Rhetoric of Hitler’s ‘Battle’” The Philosophy of Literary Form: Studies in Symbolic Action. 3rd ed. Berkeley: U of California P, 1973. 191-220. Print.
—. The Rhetoric of Religion: Studies in Logology. Berkeley: U of California P, 1970. Print.
—. “‘Watchful of Hermetics to Be Strong in Hermeneutics’ Selections from ‘Poetics, Dramatistically Considered.’” Henderson and Williams 35-80.
Cahill, William. “'Always Keep Watching for Terms': Visits with Kenneth Burke, 1989-1990.” K.B. Journal: The Journal of the Kenneth Burke Society. 7.2. (2011). Web.
Crusius. Timothy V. Kenneth Burke and the Conversation after Philosophy. Southern Illinois UP, 1999. Print.
Duncan, Hugh Dalziel. “Communication in Society.” Critical Responses to Kenneth Burke, 1924-1966. Ed. William H. Rueckert. Minneapolis: U of Minnesota P, 1969. 407-20. Print.
Griffin, Leland. “A Dramatistic Theory of the Rhetoric of Movements.” Critical Responses to Kenneth Burke, 1924-1966. Ed. William H. Rueckert. Minneapolis: U of Minnesota P, 1969. 456-78. Print.
Henderson, Greig, and David Cratis Williams, eds. Unending Conversations: New Writings by and about Kenneth Burke. Carbondale: Southern Illinois U P, 2001. Print.
Henderson, Greig. “A Rhetoric of Form: The Early Burke and Reader-Response Criticism.” In Henderson and Williams 127-42.
Hubbard, Bryan. “Reassessing Truman, the Bomb, and Revisionism: The Burlesque Frame and Entelechy in the Decision to Use Atomic Weapons Against Japan.” Western Journal of Communication. 62.3. (1998): 348-385. Print.
Jay, Paul. Ed. The Selected Correspondence of Kenneth Burke and Malcolm Cowley: 1915-1981. Berkeley, Los Angeles: U of California P, 1990. Print.
Jennerman, Donald L. “Burke’s Poetics of Catharsis.“ Representing Kenneth Burke. Eds. Hayden White and Margaret Brose. Baltimore: John Hopkins UP, 1982. 31-51. Print.
Kenneth Burke Papers. Paterno Library. Pennsylvania State University, University Park, PA.
Kuhn, Thomas S. The Structure of Scientific Revolutions. 4th ed. U of Chicago P, 2012. Print.
Lindsay, Stan A. Implicit Rhetoric: Kenneth Burke’s Extension of Aristotle’s Concept of Entelechy. Lanham, MD: University Press of America, 1998. Print.
—. “The Burkean Entelechy and the Apocalypse of John.” Ph. D. Diss. Purdue University, 1995.
Magraw, Katherine. “Edward Teller and the ‘Clean Bomb’ Episode.” Bulletin of Atomic Scientists. 44.4. (1988): 32-7. Print.
Muir, Star A. “Toward an Ecology of Language.” In Brock 35-70
Nelson, Cary. “Writing as the Accomplice of Language: Kenneth Burke and Poststructuralism.” The Legacy of Kenneth Burke. Eds. Herbert Simmons and Trevor Melia. Madison: U of Wisconsin P, 1989. 156-73. Print.
Oppenheimer, Robert J. “Physics in the Contemporary World.” Bulletin of the Atomic Scientists. 4.3. (1948): 65-68, 85-86. Print.
PBS American Experience: The Trials of J. Robert Oppenheimer. Dir. David Grubin. PBS, 2009. DVD.
Perelman, Chaim. The Realm of Rhetoric. Trans. William Kluback. South Bend: U of Notre Dame P, 1982. Print.
Polanyi, Michael. Personal Knowledge: Towards a Post-Critical Philosophy. Chicago, U of Chicago P, 1974. Print.
Russell, Bertrand. “The Study of Mathematics.” The New Quarterly. 1.4. (1907): 29-44. Print.
Spinoza, Baruch. The Ethics. Trans. R. H. M. Elwes. Project Gutenberg. 29 Jul 2007. Web. 31 Dec 2015.
Teller, Edward and Brown, Allen. The Legacy of Hiroshima. Garden City, NY: Doubleday, 1962. Print.
Teller, Edward and Latter, Albert. “The Compelling Need for Nuclear Tests.” LIFE. 44.8. (1958): 64-72. Print.
The Day after Trinity. Dir. Jon H. Else. Image Entertainment, 2002. DVD.
The Pleasure of Finding Things Out. Richard Feynman. Films Media Group, 1981. Online.
Wess, Robert. Kenneth Burke: Rhetoric, Subjectivity, Postmodernism. New York: Cambridge UP, 1996. Print.
—. “Re: Latour and Nuclear Science in France.” 19 Nov 2015. TS.
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 29396 reads
Kenneth Burke Digital Archive
Ethan Sproat, Lead Archivist, Utah Valley University
Abstract
This brief document introduces the Kenneth Burke Digital Archive (KBDA) that was established during a three-day seminar at the 2014 KBS conference in St. Louis, "Attitudes Toward Technology/Technology's Attitudes." A brief critical introduction to the KBDA, an explanation of goals, and an associated CFP are also included. Finally, this document also contains a list of all known audiovisual recordings of Kenneth Burke that are archived at various locations and universities across the country.
"The Discussion Is Interminable": Continued Conversation through the KBDA
KENNETH BURKE DEVELOPED HIS ENTIRE SYMBOL-USE PROJECT throughout the 20th century when our theories of communication were out-paced only by our means of communication. However, even though KB was one of the most influential theorists of human communication in a time of so many advances in communication technology, there is an apparent dearth of audio or video footage of KB. Yet such a dearth is only "apparent" because there actually are many existing audio and visual recordings of KB lecturing, performing readings, or participating in discussions or interviews. Most KB scholars have not seen or heard much of this footage for two basic reasons: first, the existing footage is not centrally accessible or cataloged in any one place; second, such footage is often in a medium that prohibits broad distribution (as with various analog recording technologies).
Accordingly, a small group of KB scholars led by Dr. Ethan Sproat convened during a three-day seminar at the 2014 KBS conference in St. Louis, "Attitudes Toward Technology/Technology's Attitudes." During that conference, these seminar participants effectively established the beginnings of the Kenneth Burke Digital Archive (KBDA).
The KBDA has the following goals:
- Coordinate efforts among KB scholars to identify the current repositories of all existing audio and video recordings of KB.
- Assemble historical notes and contexts of theory surrounding each recording.
- Catalog all these in one resource through KBJ: The Journal of the Kenneth Burke Society.
- Work with individual repositories to digitally transfer and transcribe all existing KB footage that is not already digitized.
- In cooperation with the Kenneth Burke Literary Trust, arrange to secure permissions to digitally archive as many of these digital materials and transcriptions as possible.
- In coordination with KBJ, arrange to have as many of these digital materials, transcripts, historical notes, and associated contextual/theoretical commentaries peer reviewed for inclusion in future issues of KBJ.
Apropos to the location of the 2014 KBS conference, the first recordings to be thus transcribed and submitted for peer review in KBJ are recordings that took place in St. Louis (see below for the entries for the reading and discussion with Howard Nemerov that KB delivered during the 1970-1971 school year at Washington University at St. Louis).
Additionally, the KBDA is a practical response to larger theoretical concerns about the role of digitization in current archiving practices. Specifically, the KBDA is a response to recommendations made by Mark Greene and Dennis Meissner in their article “More Product, Less Process: Revamping Traditional Archiving Processing,” published in the Fall/Winter 2005 issue of the American Archivist. While many responses to Greene and Meissner’s recommendations have addressed the institutional concerns of individual libraries and other associations with sizable physical/analog holdings, the KBDA project represents the formation of a digital archive outside of any given institutionalized collection. The KBDA is a meta-archive in the sense that it catalogs digitizations, transcripts, and commentaries of analog audiovisual materials that are physically archived at institutions around the USA (and perhaps, eventually, in other parts of the world). The KBDA emphasizes making digital copies of audiovisual recordings of Kenneth Burke available to KB scholars by crowd-sourcing the traditional archive staff responsibilities of arranging, preserving, and describing individual items in the KBDA (see “Call for Participation” below). The KBDA seeks to achieve what Greene and Meissner describe as the “golden minimum” for any archived collection: “the least we can do [as archivists] to get the job done in a way that is adequate to user needs, now and in the future” (237). As a peer-reviewed portion of KBJ, the KBDA also represents one way of responding to a pointed question facing any digital archive as posed by Greene and Meissner (who, in turn, are quoting the Council on Library and Information Resources): “Does the intellectual quality of the source material warrant the level of access made possible by digitizing?” (Greene and Meissner 248). In effect, the KBDA introduces contemporary KB scholars to material by Kenneth Burke that has neither been widely available nor submitted anywhere for peer review. Thereby, the KBDA allows Kenneth Burke (who passed away in 1993) to continue to contribute to ongoing conversations about his own theories.
This claim deserves more attention. In what is one of the most widely quoted passages written by him, Burke asks and then answers the question, “Where does the drama [of human life and symbol-use] get its materials? From the ‘unending conversation’ that is going on at the point in history when we are born” (110). Burke then immediately dives into his well-known parlor metaphor. In addition to a multitude of other uses, Burke’s parlor metaphor serves as part of the express theoretical basis of the bestselling composition textbook They Say / I Say by Gerald Graff and Cathy Birkenstein (Graff and Birkenstein 13). Graff and Birkenstein’s textbook is a very notable instance of Burke’s parlor metaphor being used as an invention strategy for composition students to engage with contemorary academic conversations in which they find themselves. However, in our current age of digital reproducibility, the temporally locked aspect of Burke’s parlor metaphor (i.e. whatever “is going on at the point in history when we are born”) becomes less pronounced than the “unending” aspect of the metaphor. Most pointedly, as Burke concludes his parlor metaphor, he suggests that “the discussion is interminable. The hour grows late [i.e. you grow old], you must depart [i.e. you will eventually die]. And you do depart, with the discussion still vigorously in progress” (111). A digital archive of audiovisual recordings disallows Burke (or any other similarly recorded individual) to fully depart the still-in-progress discussions surrounding their work (even after death). It’s true that a similar argument could be made about the availability of reprints of Burke’s written books, essays, fiction, and poetry. However, the “interminable” and inherently reproducible nature of audiovisual recordings made possible by 20th and 21st-century technologies situate all such recordings on more dynamic and fluid trajectories in time and space than is possible with the temporally static physicality of print materials. Furthermore, transforming any piece of analog media (audiovisual, print, or otherwise) into digital media only further unmoors the temporally grounded nature of all such media.
The basis of this sort of observation is not new. Indeed, Walter Benjamin articulates a sort of prolegomena to any future study of reproducible media in his 1936 essay, “The Work of Art in the Age of Its Technological Reproducibility.” While Benjamin’s essay specifically addresses the technological reproducibility of film as an art form, his observations apply presciently to digitally archived media as well. Benjamin acknowledges that works of art had been reproduced before his technological age. However, Benjamin contends, “In even the most perfect reproduction, one thing is lacking: the here and now of the work of art—its unique existence in a particular place. It is this unique existence—and nothing else—that bear the mark of the history to which the work has been subject” (103, emphasis in original). Conversely, Benjamin observes that new technological art forms like film lack similarly unique physical existence and instead rely on their reproducible nature for their existence in many identical iterations throughout time and space. Benjamin explains that, “In film, the technical reproducibility of the product is not an externally imposed condition of its mass dissemination, as it is, say, in literature or painting. The technological reproducibility of films is based directly on the technology of their production. This not only makes possible the mass dissemination of films in the most direct way, but actually enforces it (123, emphasis in original). If Benjamin’s observations find resonance as they relate to film (a technology originally dependent on physical copies of film reels), then his observations ought to apply more completely to digital media (a technology dependent only on computer code regardless of physical manifestation). Certainly, a piece of digital media exists by virtue of its ability to be digitally transferred more than by virtue of whatever physical platform may serve as the display for such media at any given time or place in history.
In the end, the KBDA is much more than merely a collection of recordings of Kenneth Burke at various “here-and-now” moments in his life. Ultimately, the KBDA invites KB scholars to reflect on the transferability of Kenneth Burke’s commentary in digital form (and in his own voice) into contemporary conversations of KB’s work long after he has personally departed his specific historical parlor. Certainly, KBJ: The Journal of the Kenneth Burke Society—as a digital peer-reviewed publication independent of any specific library or other archival institution—emerges as the ideal vehicle for such conversations.
Works Cited
Benjamin, Walter. "The Work of Art in the Age of Its Technological Reproducibility: Second Version." In Walter Benjamin: Selected Writings, Volume 3: 1935-1938. Trans. Edmund Jephcott et al. Ed. Howard Eiland and Michael W. Jennings. Cambridge, MA: Belkanp P of Harvard UP, 2002. 101-133. Print.
Burke, Kenneth. The Philosophy of Literary Form: Studies in Symbolic Action. 3rd Ed. Berkeley, CA: U of California P, 1973.
Graff, Gerald and Cathy Birkenstein. ”They Say / I Say”: The Moves That Matter in Academic Writing. 3rd Ed. New York, NY: W. W. Norton, 2014.
Greene, Mark A. and Dennis Meissner. "More Product, Less Process: Revamping Traditional Archival Processing." The American Archivist 68.2 (2005): 208-63. Print.
Call for Participation in the KBDA
As you can see from the extensive list of not-yet-digitized recording below, there is much work to do. Ethan Sproat (the KBDA lead archivist) is working with the Kenneth Burke Society and the KBJ editorial staff (who, in turn, are working with the Kenneth Burke Literary Trust) to take care of the necessary permissions and digitizations of every possible recording listed below.KB scholars from any background (university faculty, independent scholars, graduate students, undergraduate students, etc.) are invited to participate in any of the following activities:
- Identifying recordings of Kenneth Burke (or involving Kenneth Burke) that are not yet listed in the "List of Known KB Recordings" below.
- Being a person on-the-ground at any of the physical archival locations listed below to work as an in-person intermediary between the KBDA lead archivist and the institutions that possess not-yet-digitized KB audiovisual material.
- Transcribing a recording in coordination with the lead archivist once a recording is digitized.
- Writing historical/critical/theoretical commentary about a recording (what KB was up to at the time, the larger conversations KB was participating in at the time, the implications the recording may have for current strands of KB studies, etc.).
Digitized recordings (in accordance with appropriate permissions), their transcriptions, and any associated historical/critical/theoretical commentary will be submitted for peer review in future issues of KBJ.
If you would like to participate in the KBDA in any of the ways mentioned above, or if you would like more information about the KBDA, please contact Dr. Ethan Sproat, the KBDA Lead Archivist at Ethan.Sproat@uvu.edu or on his office phone at 801-863-5192.
Personal copies of not-yet digitized recordings of (or involving) Kenneth Burke can be shipped to the following address for quick industry-grade digitization and return shipping of the original recording:
Dr. Ethan Sproat
English and Literature, MS-153
800 West University Parkway
Utah Valley University
Orem, UT 84058
List of Known KB Recordings
The 2014 seminar in St. Louis was successful in identifying all the audio and video recordings listed below. Some recordings have already been digitally archived and transcribed at other universities and institutions (such as the 1949 Western Round Table on Modern Art at the San Francisco Art Institute; a 1966 lecture on the Theory of Terms on the American Rhetoric website; and a number of 1979 lectures and readings at the University of Cincinnati).
Each entry below is listed in chronological order by year, month, and day of its recording. A title is given for each recording (if known). Each recording's current format(s) and location(s) are given (if known). And the status of transcription, commentary, and publication in KBJ are listed.
Date of Recording: 1947
Title: "Lecture Series, 1947 / Title N/A"
Current Format(s): PDF (maybe audio)
Current Location(s) of Recording: Bennington College
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1949
Title: Western Round Table on Modern Art
Current Format(s): Audio Wire, MP3, PDF Transcripts
Current Location(s) of Recording: San Francisco Art Institute
Current Location(s) of Recording Transcript: San Francisco Art Institute
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1950, January 8
Title: "'The Rape of Culture,'" Broadcast on the University of Chicago Roundtable"
Current Format(s): Reel-to-Reel Audio
Current Location(s) of Recording: Michigan State University Libraries
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1950, February 19
Title: "'Human Nature and the Bomb,' by Helen B. McLean; William F. Ogbum; Harrison Brown; Herbert Blumer; Kenneth Burke. Broadcast of Chicago Roundtape"
Current Format(s): Reel-to-Reel Audio
Current Location(s) of Recording: Michigan State University Vincent Voice Library
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary:
Date of Recording: 1950, August 14-18
Title: "Harvard Summer School Conference on In Defense of Poetry" [readings by Kenneth Burke and others]
Current Format(s): Reel-to-Reel Audio, possible MP3 with Harvard ID access
Current Location(s) of Recording: Harvard University, Houghton Library, Woodberry Poetry Room digital collection of poetry readings
Current Location(s) of Recording Transcript: Harvard University Library, cataloged as "BLUE STAR PN1271 .H33 1950x"
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1951
Title of Recording: "Reading and Commentary [of William Carlos Williams] recorded by Kenneth Burke at his home in Andover, NJ. June 21, 1951"
Current Format(s): MP3
Current Location(s) of Recording: The Pennsylvania State University
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1952
Title of Recording: "Kenneth Burke; Janet Flanner; Marianne Moore; Elmer Rice; Glenway Wescott; Monroe Wheeler; Museum of Modern Art (New York, N.Y.). Junior Council."
Current Format(s): Reel-to-Reel MP3 recording (partial)
Current Location(s) of Recording: Museum of Modern Art (MOMA), New York, NY
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1964, October 22
Title of Recording: "Regents Lecture: 'Language in General: Poetics in Particular'"
Current Format(s): Audio Tape
Current Location(s) of Recording: University of California Santa Barbara, Tape No. A5509/R7
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1964, November 5
Title of Recording: "Regents Lecture: 'Terministic Screens'"
Current Format(s): Audio Tape
Current Location(s) of Recording: University of California Santa Barbara, Tape No. A5508/R7
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1964, November 19
Title of Recording: "Regents Lecture: 'Mind, Body, and the Unconscious'"
Current Format(s): Audio Tape
Current Location(s) of Recording: University of California Santa Barbara, Tape No. A5510/R7
Current Location(s) of Recording Transcript:
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1964, December 3
Title of Recording: "Regents Lecture: 'Coriolanus and the Delights of Faction'"
Current Format(s): Audio Tape
Current Location(s) of Recording: University of California Santa Barbara, Tape No. A5511/R7
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1966
Title of Recording: "A Theory of Terms"
Current Format(s): MP3
Current Location(s) of Recording: American Rhetoric Website
Current Location(s) of Recording Transcript: American Rhetoric Website
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1970
Title of Recording: Washington University in St. Louis Reading
Current Format(s): Audio Tape, MP3
Current Location(s) of Recording: Washington University in St. Louis Special Collections, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript: Kenneth Burke Society (Ethan Sproat)
KBJ Issue(s) with Recording, Transcript, and/or Commentary: Volume 12, Number 2 (Spring 2017)
Date of Recording: 1971
Title of Recording: Washington University in St. Louis Discussion with Howard Nemerov
Current Format(s): Audio Tape, MP3
Current Location(s) of Recording: Washington University in St. Louis Special Collections, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript: Kenneth Burke Society (Ethan Sproat)
KBJ Issue(s) with Recording, Transcript, and/or Commentary: Volume 12, Number 2 (Spring 2017)
Date of Recording: 1974-1986
Title of Recording: "An Introduction to Poetry: Edited from the Poetry Series Archives of the County College of Morris from 1974-1986"
Current Format(s): VHS, Laser Disc
Current Location(s) of Recording: University of Pittsburgh; University of Virginia; Oglethorpe University, Atlanta, GA
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1977
Title of Recording: "Evening with Kenneth Burke"
Current Format(s): Audio tape
Current Location(s) of Recording: University of Maryland Libraries (OCLC: 4019880)
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1979
Title of Recording: "An Evening with Gregory Bateson and Kenneth Burke: Asilomar, 1979"
Current Format(s): DVD
Current Location(s) of Recording: University of California, Santa Cruz (OCLC: 61104619)
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1979, May 8
Title of Recording: "Poetry Reading: 'Life is a Day by Day' First Draft"
Current Format(s): MP3
Current Location(s) of Recording: University of Cincinnati
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1979, May 8
Title of Recording: "Words in a World That Is Wordless: A Talk on the Relation Between the Realms of Motion and Action"
Current Format(s): MP3
Current Location(s) of Recording: University of Cincinnati
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1979, May 9
Title of Recording: "Picking Up the Pieces: as we round things out with questions, comments, and suggestions that have turned up along the way"
Current Format(s): MP3
Current Location(s) of Recording: University of Cincinnati
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1984
Title of Recording: "'Literary Criticism 1984: Interpretation, the Critical Difference': with Stanley Eugene Fish, Michael Riffaterre, Nancy K. Miller, Gerald Graff, Kenneth Burke, Gayatri Spivak, Charles Alteieri"
Current Format(s): Audio cassettes
Current Location(s) of Recording: Georgetown University (but unknown for sure)
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1985
Title of Recording: "Rhetoric and meta-rhetoric: The Contribution of Secular Communications Theory to Effective Preaching" (1985 Rossiter lecture given October 8-9, 1985 at Colgate Rochester Divinity School/Bexley Hall/Crozer Theological Seminary)
Current Format(s): 2 sound cassettes (ca. 150 min.) : 1 7/8 ips, mono
Current Location(s) of Recording: Colgate Rochester Crozer Divinity School, Ambrose Swasey Library, Rochester, NY
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1984-1986
Title of Recording: "The Year of the Pennsylvania Writer Collection, 1984-1986"
Current Format(s): Audio Cassette
Current Location(s) of Recording: The Pennsylvania State University
Current Location(s) of Recording Transcript:
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1986
Title of Recording: "Conversations with Kenneth Burke: Interview 1, Literary Period"
Current Format(s): U-Matic, VHS, Digital Video
Current Location(s) of Recording: University of Iowa, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript: Kenneth Burke Society (Ethan Sproat)
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1986
Title of Recording: "Conversations with Kenneth Burke: Interview 2, Social Criticism"
Current Format(s): U-Matic, VHS, Digital Video
Current Location(s) of Recording: University of Iowa, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript: Kenneth Burke Society (Ethan Sproat)
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1986
Title of Recording: "Conversations with Kenneth Burke: Interview 3, Dramatism"
Current Format(s): U-Matic, VHS, Digital Video
Current Location(s) of Recording: University of Iowa, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript:
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1986
Title of Recording: "Conversations with Kenneth Burke: Interview 4, Logology"
Current Format(s): U-Matic, VHS, Digital Video
Current Location(s) of Recording: University of Iowa, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript: Kenneth Burke Society (Ethan Sproat)
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1986
Title of Recording: "'Excerpts: The Kenneth Burke,' by KB and Malcolm Cowley"
Current Format(s): VHS
Current Location(s) of Recording: The Pennsylvania State University
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1987
Title of Recording: "Poetry in the Round Presents: Kenneth Burke & Dennis Donahue on Marian Moore"
Current Format(s): VHS
Current Location(s) of Recording: Seton Hall University, Walsh Library, South Orange, New Jersey
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1987
Title of Recording: "The First American Poetry Disc" (volume 2)
Current Format(s): VHS, CD
Current Location(s) of Recording: McGill University Library, Montreal, QC; County College of Morris, Randolph, New Jersey
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1988
Title of Recording: "Marianne Moore, in her Own Image" (KB is one of several thinkers who talk of Marianne Moore and her works)
Current Format(s): VHS
Current Location(s) of Recording: New York Center for Visual History, New York, NY; and 500+ libraries
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1989
Title of Recording: Untitled
Current Format(s): Audio Cassette, MP3
Current Location(s) of Recording: Rick Coe
Current Location(s) of Recording Transcript: Unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1989
Title of Recording: "'Language, Nonsense, and Poetry,' by Howard Nemerov, Gertrude Clarke Whittall, with comment by Kenneth Burke" (Poetry and Literature Fund, Archive of Recorded Poetry and Literature)
Current Format(s): Audio Cassette and Reel-to-Reel
Current Location(s) of Recording: Library of Congress
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1970s/1992
Title of Recording: "KB: A Conversation with Kenneth Burke"
Current Format(s): VHS, Digital Video
Current Location(s) of Recording: Chapin Foundation, Kenneth Burke Society (Ethan Sproat)
Current Location(s) of Recording Transcript: Kenneth Burke Society (Ethan Sproat)
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
Date of Recording: 1992
Title of Recording: "William Carlos Williams: The Collected Recordings"
Current Format(s): unknown
Current Location(s) of Recording: Keele University
Current Location(s) of Recording Transcript: unknown
KBJ Issue(s) with Recording, Transcript, and/or Commentary: TBA
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 21132 reads
Kenneth Burke WUSTL Reading, 4 Dec. 1970, Washington University at St. Louis
Click here for the original recording in MP3 format.
Transcribed and Edited by Adam Humes and Ethan Sproat
Editors' Note
This transcription is part of the ongoing Kenneth Burke Digital Archive (KBDA), which was initially established by a small group of KB scholars at the 2014 KBS conference in St. Louis, "Attitudes Toward Technology/Technology's Attitudes." Apropos to the location of the 2014 KBS conference, this recording and transcription also took place in St. Louis at Washington University at St. Louis (WUSTL). The transcription below is of a reading KB gave as part of the Assembly Series of invited lectures at WUSTL. At the time of the recording, KB was a visiting professor at WUSTL and a close friend of Howard Nemerov, who was a professor of poetry at WUSTL and had previously been a colleague of KB at Bennington College. During this recording, Howard Nemerov introduces KB to the audience before KB reads various poems amid his own commentary.
This transcription and the MP3 recording above appear here by permission of the Kenneth Burke Literary Trust and in coordination with the Washington University Libraries Department of Special Collections Manuscript Division. In the transcript below, timestamps in parentheses periodically precede shifts from reading to commentary or from speaker to speaker. Speakers' names appear in all caps in bold in brackets. Any portions that were unintelligible to the transcribers and editors are here represented with the word “unintelligible” in bold in brackets. If any readers have any suggested corrections to the text below based on the MP3 recording linked above, please contact Ethan Sproat, the KBDA Lead Archivist, at Ethan.Sproat@uvu.edu.]
(00:00-00:17)
[VARIOUS CROWD NOISES AND LAUGHTER]
(00:18)
[HOWARD NEMEROV:] That's the one for René Wellek I guess I better not give the introduction for René Wellek. Okay. Hey, Burke. Kenneth Burke, from the faculty of English at this university, this year as the very first visiting professor. For the most part of Mr. Burke's work, as you're aware, is in literary criticism and the study of the ways of language in general. And I could, as an introducer, properly recite the list of the titles of his works along these lines, but Mr. Burke and I got together earlier and agreed that this introduction is under no circumstances to last more than forty minutes. With, of course, a question period. And anyhow, as a demonstration of his philosophical and critical works, and a long with, he has written fictions in both prose and verse. And it is his poetry we are to hear on the present occasion. He called one volume of it a Book of Moments. That's a kind of description and key to the art. The problem in some of the poems is how much in the road from nothing to everything or the other way, too, can be eternized in a single moment if you were still to emerge with something? There's a wonderful image on the back dust jacket of his collected poems, which I've already said it was wonderful. I suspect he designed it himself. It starts like a spiral nebula from nowhere and it fades over the edge of the page into the sides. It's entirely composed of words. Alternatively, the objects of his poetry are the six biblical characteristics he set forth when he tried, poor fellow, to write a novel. Decided he couldn't write it. A real novel, the kind with plot, so he invented something like better. It had these six biblical characteristics: lamentation, rejoicing, beseechment, admonitions, sayings, and invective. I'm permitted to give you one example before his voice is not as good as mine. It's called
(02:45)
"Creation Myth."
In the beginning, there was universal Nothing.
Then Nothing said No to itself and thereby begat Something.
Which called itself, Yes.
Then No and Yes, cohabiting, begat Maybe.
Next, all three in a ménage à trois, begat Guilt.
And Guilt was of many names:
Mine, Thine, Yours, Ours, His, Hers, Its, Theirs—and Order.
In time, things so came to pass That two of its names, Guilt and Order, Honoring their great progenitors, Yes, No, and Maybe, begat History.
Finally, History fell a-dreaming
And dreamed about language—
(03:38)
And that brings us to critics who write critiques of critical criticism. Which, in turn, brings us to Kenneth Burke.
(03:56-04:13)
[APPLAUSE AND CROWD NOISE]
(04:14)
[KENNETH BURKE:] I should first tell you my—do we need this thing? I hate those things. I like to speak to you. I don't these damn machines. Can we put that off? Can I talk to you out here? Can't we? No? Can't be done? Can't be done, okay. This is progress. This is progress, I don't know. First thing, I would like to say: now is it back? Do I have to talk low or something? I don't know. You see, I've been living for years. I don't know how to do these damn things, you know? They mess me up,
(05:13)
[MALE VOICE 1:] I'll take it away for you.
(05:15)
[KENNETH BURKE:] Yeah, take it away.
(05:17)
[MALE VOICE 1:] if I can figure out how to do it. There.
(05:21)
[KENNETH BURKE:] Thank you. Now, can you hear me? I am most grateful to Howard Nemerov. And I am absolutely so against him in one way. And that is that a poet is a critic every goddamned year. Howard's half and half. A critic has to go every year either everything he does, he has to be a new deal. Or at least he has to make it look like a new deal. But I realized the racket that poets have. That is, one day I had put over a deal. They had offered me a job at a certain place where they gave me so much, and I said, "Add two hundred bucks and I will give a poetry reading." So I put this deal over, and you know, the poetry reading, because as a matter of fact, that particular poem I'm going to read to you tonight is worth two thousand two hundred dollars. By that method. But the truth is, you have this. What these fellas can do? What these poets can do, you know? Here you are: you're in your seventies, you're falling apart. If you said something last year, they say, "But he said that last year." I found out that the first time I put this deal over, then in the evening session, which was my theoretical talk, you see, that was my critical talk. I was to give a poetry session in the afternoon, and so in the evening talk, I ask for questions. And somebody got up and says, "Will you please read again that poem you read this afternoon?" I really put the poet's hat on this poor critic. I'm just working like hell to write poetry. Anyhow, I would like to first read the poem that has that sort of angle. The poem that was in here, "Heavy, Heavy—What Hangs Over?" Remember that little thing?
(09:41)
"Heavy, Heavy—What Hangs Over?"
at eighty
reading lines
he wrote at twenty
the storm now past
a gust in the big tree
splatters raindrops
on the roof
That makes sense to you? You got a storm going on its way. After that's over, so it's all through, and then a little wind summons creatures. Well, you know these fellas, they can sell their poems at the age of seventeen and I'm going to sell mine at the age of seventy. Tonight? Yes, I will read you some poems that I have written at the age of seventeen. But first I want to present my major number, I think. The rhetoricians tell me that your attention span is best at the beginning of a talk, so I'm going to read my long poem at the beginning of this talk. And it has to do with a situation I think you might be interested in. Over in [unintelligible], I'm trying to work this both ways. I'm trying to read a poem and talk about the kinds of things you might be interested in just as if I was just giving a lecture. We have a problem like this in this poem. I was immobilized in Brooklyn at this time because my wife happened to be physically immobilized and I was psychically immobilized. So we sat over this place in Brooklyn, looking over from Brooklyn Heights over to the southern end of Manhattan Island. Half of it was the bay and half of it was Manhattan Island. And there's no question about it, that—I thought that I was an insomniac, I would be up at around three or four 'o clock in the morning—that place was just blazing. Incredible. And that was exactly the same place in Brooklyn Heights, where Whitman came across. And there was the bridge, still there. [Hart's Range Bridge.] That's all cleared up. Of course, the Brooklyn ferry is not any longer there, that very street that he was living on, that very street I was living on, that's all Jehovah's Witnesses now. They work another angle. I build from that. I get the notion that I get the structure of this before we start: there are there stages. Here is where Whitman crossed on a ferry. Well, same area, same place from there. He went back, but that's all gone. And here's the bridge that Hart went across, here was I—let's say here was the writer—who was immobilized because his companion was immobilized. His companion was immobilized physically, so he was immobilized psychologically. So all he could do was see, was look across, you see. So the thing is called "Eye-Crossing—From Brooklyn to Manhattan." as built that way. Now in this picture, in this story that I tell, after the poem came out I was asked who was the Olympian leper that I referred to? And why was he a leper I said, "He was an Olympian because he was a man who transcended his physical problems. He was really a transcendentalist. I mean, he was a leper, because he was a leper. A poet, a critic, a thinker, a wall. If any of you have never met, remind me to go on. He was a beauty of his ways of dealing with all these problems. So when I refer to the Olympian leper in this poem, I am referring to [unintelligible]. This poem is dedicated to Marianne Moore, Marianne Moore was one of the most astonishing experiences of my life. She even taught me, for a while, to blush. I've lost the ability since then. She really had such delicacy, such perception. She would say all kinds of things, all of the sudden, I don't know. I don't know. But she had by the time this poem was written, Marianne Moore had left Brooklyn and gone back to New York. So that's the twist there. So therefore, our relationship with the Dodgers is a little bit ambiguous from then on. I don't know, a few little spots as we go along, you see, I'm only going to do one long poem because the rhetoricians that you can only hope to hold them for so long. your attention span will run down. So this is the only long poem I'm gong to do this evening. Pleas have that attention span spare. But I have to make a few little spots along the way. You could work this out for yourselves if you had a little more time. There's a couple of spots—for instance, you have Scylla and Charybdis. So in the first two lines, I don't know why I messed that up. Why worry about it? I’ll just do it the way I do it.
(19:17)
[I]
Scheming to pick my way past Charybdylla
(or do I mean Scyllybdis?)
caught in the midst of being nearly over,
not “midway on the roadway of our life,”
(19:38)
You know, that's what I'm doing there, "mezzo del cammin nostra vita." That's the big line in Dante that I'm referring to there.
(19:50)
a septuagenarian valetudinarian
(19:56)
A ninety guy who is ailing.
(20:01)
thrown into an airy osprey-eyrie
(20:06)
I should tell you about this place where we are. We were over this whole thing. This'll build up if you might know it in the first place. We were up, looking out over that bay. It's really one of the most marvelous spots in the world. You'll find my terror of the whole situation. It will come through. But that is the most incredible place. It is actually the eighth miracle of the [unintelligible] miracle, but to see that place at four o'clock in the morning. You wake up and there it is, just big, big. It's raging. So that's what I mean by that marvelous place we were then.
(21:05)
[I]
with a view most spacious
(and every bit of it our country's primal gateway even),
although, dear friends, I'd love to see you later,
after the whole thing's done,
comparing notes, us comically telling one another
just what we knew or thought we knew
that others of us didn't,
all told what fools we were, every last one of us—
I'd love the thought, a humane after-life,
more fun than a bbl. of monkeys,
but what with being sick of wooing Slumber,
I'll settle gladly for Oblivion.
(22:02)
Second [II]
Weep, Hypochondriasis (hell, I mean smile):
The bell rang, I laid my text aside,
The day begins in earnest, they have brought the mail.
And now to age and ailments add
a thirteen-page single-spaced typed missile-missive,
to start the New Year right.
On the first of two-faced January,
"… the injuries you inflict upon me … persecution …
such legal felonies … unremitting efforts … malice, raids,
slander, conspiracy … your spitefulness …"
—just when I talked of getting through the narrows,
now I'm not so sure.
Smile, Hypochondriasis, (her, I mean wanly weep).
(23:20)
[III]
Let's being again.
Crossing by eye, from Brooklyn to Manhattan,
(23:30) Maybe I forgot to tell you, it's called "Eye-Crossing—from Brooklyn to Manhattan." I'm saying we only cross by eye because we're caught on this side. What we're gong to do here; we have to do two things. We have to cross, and come back and look at things on this side, Brooklyn. Then we go back and forth. We only just look across. Let's begin again:
(23:56)
Crossing by eye, from Brooklyn to Manhattan
(Walt's was a ferry crossing,
Hart's by bridge)—
(24:08)
Now get that thing I'm trying to build up three stages here. Three stages, basically. I'm trying to build up the difference between Whitman's "Sail Stock", and Hart's "Nostalgia," and where we are now. I'm just trying to build a sequence that way. That's what I'm working on here, so watch it and you want to do a [unintelligible] that's the structure I'm working on. Let's begin again:
(24:35)
Crossing by eye, from Brooklyn to Manhattan
(Walt's was a ferry-crossing,
Hart's by bridge)—
to those historic primi donni,
(24:59)
I made up a word there, if you noticed. Here I am an ideal in an eye. What would be the masculine [unintelligible]. I just figured I'd do the best I could do.
(25:18)
to those historic primi donni,
(25:22)
Here I am, an ideal in an eye.
(25:28)
now add me, and call me what you will.
From Brooklyn, now deserted
by both Marianne Moore and the Dodgers—
(25:38)
I forgot to tell you, this poem is dedicated to Marianne Moore.
(25:44)
an eye-crossing
with me knocked cross-eyed or cockeyed
by a maddening, by a saddening vexing letter
from a dear friend gone sour.
I think of a Pandora's box uncorked
while I was trying to untie
Laocoön's hydra-headed Gordian knot,
entangled in a maze of Daedalus,
plus modern traffic jam cum blackout.
Let's begin again.
(26:25)
[IV]
The architectural piles,
(26:30)
Looking over from Brooklyn, would know what goddamned stuff they've got over there.
(26:34)
The architectural piles, erections, impositions,
monsters of high-powered real estate promotion—
from a room high on Brooklyn Heights
the gaze is across and UP, to those things' peaks,
their arrogance!
When measured by this scale of views from Brooklyn
they are as though deserted.
And the boats worrying
(27:08)
He can't see anything of them.
(27:11)
And the boats worrying the harbor
they too are visibly deserted
smoothly and silent
moving in disparate directions
each as but yielding to a trend that bears it
like sticks without volition
carried on a congeries
of crossing currents.
And void of human habitation,
the cars on Madhatter's Eastern drive-away
formless as stars
speeding slowly
close by the feet of the godam mystic giants—
a restlessness unending, back and forth
(glimpses of a drive, or drivenness,
from somewhere underneath the roots of reason)
(28:18)
I'd like to give those lines. By popular request I'm reading those lines over again.
(28:25)
(glimpses of a drive, or drivenness,
from somewhere underneath the roots of reason)
me looking West, towards Manhattan, Newark, West
Eye-crossing I have seen the sunrise
gleaming in the splotch and splatter
of Western windows facing East.
(28:52)
Now give me a chance for the next section. I'd like to give you a couple of things to prepare for. I used the fact that B-E-H-E-M-O-T-H uses two accents. you can say either beheMOTH or beHEmoth. And I used the word "boustrophedon." Now I know many of you know boustrophedon and many of you don't. I must admit that for a few years, I didn't know boustrophedon. Boustrophedon comes from a word which comes form "bous" is the ox, and "strophe" the turn. And what it refers to is when the ox went to the end of the line and turned. When you were plowing, you went back and forth and the word was used for kinds of languages. Some go from right to left and some go from left to right. Between Hebrew and English you get all these twists back and forth. So the next stanza works with that.
(30:25)
[V]
East?
(30:27)
You see we ended up there, I was looking west and seeing the east in the reflected.
(30:36)
East? West?
Between USSR and USA,
their Béhemoth and our Behémoth,
a dialogue of sorts?
Two damned ungainly beasts,
threats to the entire human race's race
but for their measured dread of each the other.
How give or get an honest answer?
Forgive me for this boustrophedon mood
going from left to right, then right to left,
pulling the plow thus back and forth alternately
a digging of furrows not in a field to plant,
but on my own disgruntled dumb-ox forehead.
My Gawd! Begin again!
(31:44)
See, I do these studies on two sides. Some I'm doing on the side of Brooklyn. some I'm looking over to New York, in Manhattan.
(31:54)
[VI]
Turn back. Now just on this side:.
By keeping your wits about you,.
you can avoid the voidings,.
the dog-signs scattered on the streets and sidewalks.
(you meet them face to faeces).
and everywhere the signs of people.
(you meet them face to face).
The Waltman, with time and tide before him,.
he saw things face to face, he said so.
then there came a big blow.
the pavements got scoured drastically.
—exalted, I howled back.
into the teeth of the biting wind.
me in Klondike zeal.
inhaling powdered dog-dung.
(here's a new perversion).
now but an essence on the fitful gale.
Still turning back.
Surmarket—mock-heroic confrontation at—.
(An Interlude).
(33:17)
You ask why I have used a surmarket as agianst supermarket. After all, they say surrealism is against superrealism, so why can't I say surmarket as against supermarket? We've got now a confrontation of bull acts and an interlude. This is a mock heroic confrontation.
(33:50)
[VII]
Near closing time, we're zeroing in.
Ignatius Panallergicus
(33:58)
Panallergicus, huh? That's me, and allergic to everything? Pan allergicus No? No?
(34:07)
Ignatius Panallergicus (that's me)
his cart but moderately filled
(less than five dollars buys the lot)
he picks the likeliest queue and goes line up
then waits, while for one shopper far ahead
the lady at the counter tick-ticks off and tallies
items enough to gorge a regiment.
Then, lo! a possibility not yet disclosed sets in.
While Panallergicus stands waiting
next into line a further cart wheels up,
whereat Ignatius Panallergicus (myself, unknowingly
the very soul of Troublous Helpfullness) suggests:
"It seems to me, my friend, you'd come out best
on that line rather than on one of these."
And so (let's call him "Primus")
Primus shifts.
Development atop development:
Up comes another, obviously "Secundus,"
to take his stand behind Ignatius, sunk in thought.
No sooner had Secundus joined the line
than he addressed Ignatius Panallerge approximately thus:
"Good neighbor,
(35:46)
I'm trying to make this very realistic.
(35:52)
"Good neighbor, of this temporary junction,
pray, guard my rights in this arrangement
while I race off to get one further item,"
then promptly left, and so things stood.
But no. Precisely now in mankind's pilgrimage
who suddenly decides to change his mind
but Primus who, abandoning his other post,
returns to enroll himself again in line behind Ignatius.
Since, to that end, he acts to shove aside
Secundus' cart and cargo, Crisis looms.
Uneasy, Panallergicus explains:
"A certain …Iamsorry … but you see …
I was entrusted … towards the preservation of …"
but no need protest further—
for here is Secundus back,
and wrathful of his rights
as ever epic hero of an epoch-making war
Both aging champions fall into a flurry
of fishwife fury,
(37:13)
Honest to God, I'm just throwing this stuff out there.
(37:21)
of fishwife fury, even to such emphatical extent
that each begins to jettison the other's cargo.
While the contestants rage, pale Panallerge
grins helplessly at others looking on.
But Primus spots him in this very act and shouts
for all to hear, "It's all his fault … he was the one …
he brought this all about …"
and Panallergicus now saw himself
as others see him, with a traitor's wiles.
I spare the rest. (There was much more to come)
How An Authority came swinging in,
twisted Secundus' arm behind his back
and rushed him bumbling from the store.
(38:15)
I tried to do a suggestion that around about there that the bums rush up.
(38:24)
How further consequences flowed in turn,
I leave all that unsaid.
And always now, when edging towards the counter,
his cargo in his cart,
Our Ignatz Panallerge Bruxisticus
(38:44)
He's got a new name now, he's been through. Bruxisticus comes from bruxism is the psychological twist of gritting your teeth.
(39:01)
our Ignatz Panallerge Bruxisticus
(gnashing his costly, poorly fitting dentures)
feels all about his head
a glowering anti-glowing counter-halo …
(39:18)
Haven't I done a job with counter halos? Haven't I got it countered in two ways? The counter you're around but the counter...
(39:30)
Is that a millstone hung about his neck?
No, it is but the pressing-down
of sixty plus eleven annual milestones.
(39:44)
That was when I was seventy-one. I was just a kid then.
(39:47)
(It was before the damning letter came.
Had those good burghers also known of that!)
(39:59)
[VIII]
But no! Turn back from turning back. Begin again:
of a late fall evening
I walked on the Esplanade
(40:10)
Anybody know that place there? It's just a marvelous thing. I can't build that up for you enough.
(40:16)
looking across at the blaze of Walt's Madhatter
and north to Hart's graceful bridge, all lighted
in a cold, fitful gale I walked
on the Esplanade in Brooklyn now deserted
by both Marianne and the Dodgers.
Things seemed spooky—
eight or ten lone wandering shapes,
and all as afraid of me as I of them?
We kept a wholesome distance from one another.
Had you shrieked for help in that bluster
who'd have heard you?
Me and my alky in that cold fitful bluster
on the Esplanade that night
above the tiers of the mumbling unseen traffic
It was scary
it was ecstactic
(41:19)
[unintelligible]
(41:23)
[IX]
Some decades earlier, before my Pap
(41:28)
Here's a twist in this thing here. Pap is worry, a personal concerning thing. Here I was, near the emblem. I'm looking this way, but a way back like God, first came to New York looking the other way, towards the east.
(41:49)
Some decades earlier, before my Pap
fell on evil days (we then were perched
atop the Palisades, looking East, and down
upon the traffic-heavings of the Hudson)
I still remember Gramma (there from Pittsburgh for a spell)
watching the tiny tugs tug monsters.
Out of her inborn sweetness and memories
of striving, puffing all that together,
"Those poor little tugs!" she'd say.
God only knows what all
she might be being sorry for.
(42:33)
Why did she say that thing? She'd sit up there, watching those pulling those folks around the highway. Those poor little tugs, pulling all those big freighters. Poor little tugs. I think her whole life was behind that is what I'm getting at. Now, repeatedly, we watch the tugs. Poor little tugs from here. they're over there in Brooklyn and we're on the other side.
(43:12)
their signals back and forth as though complaining.
The two tugs help each other tugging, pushing
(against the current into place)
a sluggish ship to be aligned along a dock,
a bungling, bumbling, bulging, over-laden freighter.
Their task completed,
the two tugs toot good-bye,
go tripping on their way,
leaning as lightly forward
as with a hiker
suddenly divested
of his knapsack.
"Good-bye," rejoicingly, "good-bye"—
whereat I wonder:
Might there also be a viable albeit risky way
to toot
"If you should drive up and ask me,
I think you damn near botched that job"?
"I think you stink."
What might comprise the total range and nature
of tugboat-tooting nomenclature?
(44:33)
Profusion of confusion. No, wait, don't. Am I still here? No. Am I still here? We changed the rhythm. We changed the pace.
(44:50)
[X]
a plunk-plunk juke-box joint
him hunched on a stool
peering beyond his drink
at bottles lined up, variously pregnant
(there’s a gleaming for you)
Among the gents
a scattering of trick floozies.
May be they know or not
just where they'll end,
come closing time.
He'll be in a room alone
himself and his many-mirrored other.
It was a plunk-plunk juke-box joint
its lights in shadow
(45:43)
[XII]
Profusion of confusion. What of a tunnel-crossing?
What if by mail, phone, telegraph, or aircraft,
or for that matter, hearse?
You're in a subway car, tired, hanging from a hook,
and you would get relief?
Here's all I have to offer:
Sing out our national anthem, loud and clear,
and when in deference to the tune
the seated passengers arise,
you quickly slip into whatever seat
seems safest. (I figured out this scheme,
but never tried it.)
Problems pile up, like the buildings,
Even as I write, the highest to the left
soars higher day by day.
Now but the skeleton of itself
(these things begin as people end!)
(46:45)
Do you know what I mean there? They build a skeleton first. First they put that basic structure on, and then they put all that stuff around it. So that's what I mean by saying, "Now, with the skeleton of itself," That the basic structure, these things begin as people end.
(47:11)
all night its network of naked bulbs keeps flickering
towards us here in Brooklyn …
then dying into dawn …
or are our … are our what?
(47:27)
I'll confess to you, that last line I put in doesn't make any sense. Except, I didn't say I could positively say it without growling. Rawr rat what? I put it in for that reason.
Now the next one is an epic simile that falls apart. It's time for that, isn't it?
(48:03)
[XIII]
As with an aging literary man who, knowing
that words see but within
yet finding himself impelled to build a poem
that takes for generating core a startling View,
a novel visual Spaciousness
(he asks himself: "Those who have not witnessed it,
how tell them?—and why tell those who have?
Can you do more than say ‘remember’?")
(48:38)
Imagine trying to say if you haven't seen that damn thing from there, I can't tell you really what a fantastic vision it is. From there, from Brooklyn, Looking at a tree at four o'clock in the morning. And I just don't know how to handle that.
(49:01)
and as he learns the ceaseless march of one-time modulatings
unique to this, out of eternity,
this one-time combination
of primal nature (Earth's) and urban, technic second nature
there gleaming, towering, spreading out and up
there by the many-colored, changing-colored water
(why all that burning, all throughout the night?
some say a good percentage is because
the cleaning women leave the lights lit.
But no—it's the computers
all night long now
they go on getting fed.)
(49:57)
I might bring in a spot there. Years ago, about the first job I had really, well paying job, I was working down there, at 61 Broadway. you could go out that place at night, but you wanted to stay and work in your office. which is like going out into a remote village. It was, my God, that place was just simply blazing. All night now. What's the difference? Just what I said. It's the computers being fed. They've got to keep those animals fed.
(50:49)
as such a man may ask himself and try,
as such a one, knowing that words see but inside,
noting repeated through the day or night
the flash of ambulance or parked patrol car,
wondering, "Is it a ticket this time, or a wreck?"
or may be setting up conditions there
that helicopters land with greater safety,
so puzzling I, eye-crossing …
and find myself repeating (and hear the words
of a now dead once Olympian leper),
"Intelligence is an accident
Genius is a catastrophe."
(51:45)
That's the one. That's the one. Thank God it's not mine.
(51:51)
A jumble of towering tombstones
hollowed, not hallowed,
and in the night incandescent
striving ever to outstretch one another
like stalks of weeds dried brittle in the fall.
Or is it a mighty pack of mausoleums?
Or powerhouses of decay and death—
towards the poisoning of our soil, our streams, the air,
roots of unhappy wars abroad,
miraculous medicine, amassing beyond imagination
the means of pestilence,
madly wasteful journeys to the moon (why go at all,
except to show you can get back?)
I recalled the wanly winged words of a now dead gracious leper.
(My own words tangle like our entangled ways,
of hoping to stave off destruction
by piling up magic mountains of destructiveness.)
(53:23)
[XIV]
Do I foresee the day?
Calling his counsellors and medicos,
do I foresee a day, when Unus Plurium
World Ruler Absolute, and yet the august hulk
is wearing out—do I foresee such time?
Calling his counsellors and medicos together,
"That lad who won the race so valiantly,"
he tells them, and His Word is Law,
"I'd like that bright lad's kidneys—
and either honor him by changing his with mine
or find some others for him, as opportunity offers."
No sooner said than done.
Thus once again The State is rescued—
and Unus over all, drags on till next time.
Do I foresee that day, while gazing across, as though that realm was alien
Forfend forfending of my prayer
that if and when and as such things should be
those (from here) silent monsters
those (from here) silent monsters (over there)
will have by then gone crumbled into rubble,
and nothing all abroad
but ancient Egypt's pyramidal piles of empire-building hierarchal stylized
dung remains.
Oh, I have haggled nearly sixty years
in all the seventies I've moved along.
My country, as my aimless ending nears,
oh, dear my country, may I be proved wrong!
(55:34)
Now I have two stanzas here. One on Whitman, and one on a Hart and then the final. The quotations in the Whitman are from his "Crossing Brooklyn's Ferry."
(55:52)
[XV]
"Eye-crossing" I had said? The harbor space so sets it up.
In Walt's ferry-crossing, besides the jumble of things seen
(they leave him "disintegrated")
even the sheer words "see," "sight," "look," and "watch" add up
to 33
(56:16)
I think that's a dirty trick. I'm not so sure. I'm afraid to try it again or anyhow.
(56:20)
the number of a major mythic cross-ifying.
(56:24)
I don't know. I think it now and again, it does that, after that, I haven't checked that again, but you get the idea anyhow.
(56:31)
33, the number of a major mythic cross-ifying.
In the last section of the Waltman's testimony
there is but "gaze," and through a "necessary film" yet …
"Gaze" as though glazed? It's not unlikely.
"Suspend," he says, "here and everywhere, eternal float of solution."
And the talk is of "Appearances" that "envelop the soul."
Between this culminating ritual translation
and the sheer recordings of the senses
there had been intermediate thoughts
of "looking" forward to later generations "looking" back.
Walt the visionary, prophetically seeing crowds of cronies
crossing and recrossing
on the ferry that itself no longer crosses.
(57:37)
That's a vision for you.
(57:41)
Six is the problematic section.
There he takes it easy, cataloguing all his vices
as though basking on a comfortable beach.
(57:53)
That's a wonderful trick, that is.
(57:57)
His tricks of ideal democratic promiscuity
include his tricks of ideal man-love.
In section six he does a sliding, it makes him feel good.
Blandly blind to the promotion racket stirring already all about him,
Blandly blind to the promotion racket stirring already all about him,
he "bathed in the waters" without reference to their imminent defiling
(Now even a single one
of the many monsters since accumulated
could contaminate the stream for miles.)
He sang as though it were all his—
a continent to give away for kicks.
And such criss-crossing made him feel pretty godam good.
Flow on, filthy river,
ebbing with flood-tide and with ebb-tide flooding.
Stand up, you feelingless Erections,
Fly on, O Flight, be it to fly or flee.
Thrive, cancerous cities.
Load the once lovely streams with the clogged filter of your filth.
"Expand,"
even to the moon and beyond yet.
"There is perfection in you" in the sense
that even empire-plunder can't corrupt entirely.
(59:54)
That's the end of the Whitman. Now I go to the Hart-Crane one. I treat here the twist between idealistic and realistic.
(1:00:07)
[XVI]
And what of Hart's crossing by the bridge?
"Inviolate curve," he says. Who brought that up?
The tribute gets its maturing in the penultimate stanza,
"Under thy shadow by the piers I waited."
Hart too was looking.
But things have moved on since the days of Walt,
and Hart is tunnel-conscious.
And fittingly the subway stop at Wall Street,
first station on the other side,
gets named in the middle quatrain of the "Proem"
(Wall as fate-laden as Jericho, or now as mad Madison
of magic Madhatter Island.) Ah! I ache!
Hart lets you take your pick:
"Prayer of pariah and the lover's cry."
(1:01:11)
Here's the alternative:
(1:01:14)
(If crossing now on Brooklyn Bridge by car,
be sure your tires are sound—
for if one blows out you must keep right on riding
on the rim. That's how it sets up now
with what Hart calls a "curveship"
lent as a "myth to God."
I speak in the light of subsequent developments.)
Elsewhere, "The last bear, shot drinking in the Dakotas,"
Hart's thoughts having gone beneath the river by tunnel, and
"from tunnel into field," whereat "iron strides the dew."
Hart saw the glory, turning to decay,
albeit euphemized in terms of "time's rendings."
And by his rules, sliding from Hudson to the Mississippi,
he could end on a tongued meeting of river there and gulf,
a "Passion" with "hosannas silently below."
All told, though Walt was promissory,
Hart was nostalgic, Hart was future-loving only insofar
as driven by his need to hunt (to hunt the hart).
And as for me, an apprehensive whosis
I'm still talking of a crossing on a river
(1:02:55)
And I might say here that the reference of the thing here has to with the first time they went around the moon before they ever set foot on the moon.
(1:03:09)
I'm still talking of a crossing on a river
when three men have jumped over the moon,
a project we are told computer-wise
involving the social labor of 300,000 specialists
and 20,000 businesses.
Such are the signs one necessarily sees,
gleaming across the water,
the lights cutting clean
all through the crisp winter night.
"O! Ego, the pity of it, Ego!"
(1:03:3)
That's my most ambitious pun. "Iago, the pity of it, Iago!'
(1:03:54)
"O! Ego, the pity of it, Ego!"
"Malice, slander, conspiracy," the letter had said;
"your spitefulness …"
(1:04:06)
[XVII]
Crossing?
Just as the roads get jammed that lead
each week-day morning from Long Island to Manhattan,
so the roads get jammed that lead that evening
from Manhattan to Long Island.
And many's the driver that crosses cursing.
Meanwhile, lo! the Vista-viewing from our windows at burning nightfall:
To the left, the scattered lights on the water,
hazing into the shore in Jersey, on the horizon.
To the right, the cardboard stage-set of the blazing buildings.
Which is to say:
To the left,
me looking West as though looking Up,
it is with the lights in the harbor
as with stars in the sky,
just lights, pure of human filth—
or is it?
To the right,
the towerings of Lower Manhattan
ablaze at our windows
as though the town were a catastrophe
as doubtless it is …
[APPLAUSE]
- 18214 reads
Kenneth Burke Discussion with Howard Nemerov, 4 Mar. 1971, Washington University at St. Louis
Click here for the original recording in MP3 format.
Transcribed and Edited by Adam Humes and Ethan Sproat
Editors' Note
This transcription is part of the ongoing Kenneth Burke Digital Archive (KBDA), which was initially established by a small group of KB scholars at the 2014 KBS conference in St. Louis, "Attitudes Toward Technology/Technology's Attitudes." Apropos to the location of the 2014 KBS conference, this recording and transcription also took place in St. Louis at Washington University at St. Louis (WUSTL). The transcription below is of a discussion between KB and Howard Nemerov, a professor of poetry at WUSTL. Nemerov and KB were good friends and colleagues who had worked together previously at Bennington College. At the time of this recording, KB was a visiting professor at WUSTL. During this recording, Howard Nemerov and KB discuss various aspects of KB's poetry.
This transcription and the MP3 recording above appear here by permission of the Kenneth Burke Literary Trust and in coordination with the Washington University Libraries Department of Special Collections Manuscript Division. In the transcript below, timestamps in parentheses periodically precede shifts from reading to commentary or from speaker to speaker. Speakers' names appear in all caps in bold in brackets. Any portions that were unintelligible to the transcribers and editors are here represented with the word “unintelligible” in bold in brackets. If any readers have any suggested corrections to the text below based on the MP3 recording linked above, please contact Ethan Sproat, the KBDA Lead Archivist, at Ethan.Sproat@uvu.edu.]
(00:00-00:09)
[NOTES ON PIANO]
(00:10)
[MALE VOICE 1:] [unintelligible] Club. Our speakers tonight are Kenneth Burke and Howard Nemerov. They tell me they have a game plan, but don't tell me what it is, so I'll leave it to them to show us what it is.
(00:26)
[HOWARD NEMEROV:] Well we've come to improvise, and we trust our powers of it insomuch that we brought our collected works along and are prepared just to sit there and to read to you out of them, maybe antiphonally. This is really Mr. Burke's show, I got kind of added to it the last day or two. So the idea was to see how long I could read something before Kenneth interrupted, because as we have allowed to each other the essence of this good word-man is that he wouldn't let a good explanation go unexplained. If I explain something, we've got to cap it. First, I got a little document that says I'm not gonna get more than three sentences through, but I took the precaution of bringing some other little documents that I didn't show him, as well as an essay about him which he was allowed to read finally on his request when it got to stage of proof. In which he said dourly, "That's very kind of you. Preserved your own independence at the same time, didn't you?" How do you do, Doctor? You'll get your chance. Do you want to go now?
(01:52)
[KENNETH BURKE:] Do you want to sit down?
(01:54)
[HOWARD NEMEROV:] I'll stand up. I'll stand on the table because otherwise I won't have the stature.
(02:01)
[KENNETH BURKE:] Because I have a lot of that.
(2:05)
[HOWARD NEMEROV:] This is on the question, "What is Man?" It's the minutes of the faculty meeting on the subject. I've been noticing that every discipline has a way of undercutting the others to say, "I am the essential where as you guys are kind of peripheral." And this never really got anywhere, but it might set somebody else off. What is man? Who professed through chemistry said that is easily answered, "A handful of chemicals and a lot of water. The whole business maybe a dollar ninety-eight, and that was only on the account of inflation. I remember in Popular Mechanics it was ninety-six cents years ago. "But the organization of all this stuff," said the professor of biology, "gives an impression of being directed and purposive that is quite foreign to the organization of the same chemicals in other relation." "But if you want to know what we are," said the professor of physics, "the fundamental thing to get straight is that we are arrangement of atoms dancing around in mostly void". And here the professor of economics got in: "If people were not paid to talk this stuff," he said, "people would not talk this stuff. Man was essentially an arrangement to ensure the steady circulation of goods and services." The professor of history sighed and said that the really interesting thing about what you were calling "man" was not his opinions about himself, but how he came over the course of millennia to hold the opinions he did. Now the professor of neurophysiology said that he would like to agree with the professor of history, but he said, from a radically different point of view. Now that we understood he said the interior of the brain to contain neither thought more words but only neurons it was truly fascinating to hear a body of learned men continue to talk as though—the professor of philosophy here interrupted to say that in that event his learned colleague in neurophysiology wasn't saying anything he was only clicking his neurons. any resemblance to thought would be recognized as purely coincidental. The professor of linguistic analysis he remarked after [unintelligible] nothing at all, that the really strange thing about man was his propensity to think of the universe and himself as generated according to the rules that generated grammar. In this instance the Indo-European ones. you want to get in there?
(04:44)
[KENNETH BURKE:] I want you to finish your page first
(04:48)
[HOWARD NEMEROV:] Whereupon the professor of English misquoted Samuel Johnson to effect that when the disputes of monarchs were discussed by grammarians they became disputes about grammar. The professor of moral theology pointed out that their question in somewhat fuller form asked by the Psalmist “What is man that thou art mindful of him?” permitted the answer to be inferred rather plainly, not much. The professor of anthropology observed that man was strikingly defined as the animal having gods, no other animal he said did that or anything like it. “One might with equal force contend,” said the university librarian, “that man is the animal who writes books. many of them about what is man. No other animal was known to do that either.” The professor of business administration suggested here that an interdisciplinary committee would be set off—
where upon the professor of political science broke in to say that man was the animal who formed committees. That just because the end of the page
(05:59)
[KENNETH BURKE:] well the reason i was happy to have this beginning was that i had thought i had an answer. My difficult friend here had showed me. And the idea's this: he offered a lot of definitions you see, which my definition would be among those present. Yet I have to find some way of claiming that this is the definition against all the other definitions. And the way I tried to work that out is this: all those definitions, every one of the has one thing in common, therefore we have to move to a higher level of generalization there, and note that all of them are definitions. What does it mean to be this defining animal? No other animal that we know of writes definition of itself. So therefore despite not only the differences among them, these definitions, they're all the use of symbol systems, every one uses some organized symbol system to get its statement made. So therefore, I would say that by that very situation the very internally the embarrassment of the diversity into something on my side by saying therefore we will define man as this symbol using animal. And that will cover the whole blame ground of them. Now given the symbol using animal, he can run committees; he can do all this and that but this would be the overall characterization for the lot. I ran across particularly in my definition of man, which of course I began defining man as the symbol using animal. I remember, by the way, we might keep in mind the overall logic of this discussion which doubtless get lost which we're supposed to be working on, and that is that its the matter of language in general and poetics in particular. In other words, we're going to do, what is it did you say about this whole field, our field, when you just talk about the fact that we are this symbol using animal and what do you say when you're discussing one particular problem in the analysis of the text and so on. We have to keep shifting back and forth. I've found that this has been my problem over about fifty years of teaching and that you just never quite resolved. If you talk to some people are interested say in philosophy and sociology and so on are interested in the notion of approaching this subject for the more general point of view, that would be the government of language in general. And yet when we have our special field where you're dealing with works in particular and I've tried to work out, more or less, a—I wouldn't say heroic—but a viable scheme working back and forth between those two. What would you say about a text purely from a stand point of it as a poem and what would you say about it as a standpoint of a statement of a citizen/taxpayer who has not necessarily fooled at all? in other words, he's using symbol systems. And in my definition of man, which by popular request I will now read to you, I got into this problem in discussing the third clause, where the problem really comes up in the most acute way. If I say, starting out step by step, now man is the symbol using animal and then we'll get our first definition. Then I will say inventor of the negative. We can go onto that if you want to discuss it. I've discussed it in an earlier talk here. That is the notion that the negative is a purely linguistic notion and doesn't exist in nature. The third, separated from his natural condition by instruments of his own making. That had to do with all these definitions that man is the tool-making animal. It is our ability to make tools that separated us so greatly from what would be in the state of nature. So it was dealing with that particular clause that i ran across the notion some people would say well why not the tool-making animal rather than the symbol using animal. And it was there that I ran into this maybe formalistic answer. That is even defining him as the tool-making animal you still have a higher level of generalization there. In other words, you're already using symbol systems, so let's go from your highest level of generalization for your definition that's about what they [unintelligible] there, no point in going to the next two stages of the definition, I want them to see what the issue is there. In other words, I just invite you to ask about it. I'm not trying to get away with something here. The point is does this sound like a reasonable way to approach a problem like that. Can you, should you, in making a definition, try to arrive at the highest level of generalization at that stage for your definition? Therefore, should this fact, that we are the specialists in symbol using, be the characteristic element? On a basis of that, you can derive our aptitude, a lot of it rather unfortunate, with tool-making. The very fact that you can use symbol systems produces the kind of attention whereby you can actually invent things and particularly, hand on the intention. You can tell somebody else what you've done and so on. Therefore a statement that might be an act of genius under conditions otherwise becomes something where you can make the whole tribe the equivalent of genius in that sense. You can tell them how to sew or how to this or that which with mere imitation they couldn't have done. The quality of attention wouldn't be there without this prior kind of sharpening up you get from being this kind of animal. As we go on, you'll find out that that isn't by any means just an honorific thing, it is also a problematic element. Mainly because the very fact that we do have a way of bringing the non-symbolic or the external reality into ourselves, making a bridge between these two realms, also implies that we have a gulf at the bracing point. In all likelihood it is the basis alienation right there before you get to the kinds of alienation you get in problems of property structures and so on. At that stage, we have a homelessness in relation to nature that an organism presumes he would not have if it did not have this particular genius of ours. When I made this mild neologism, the ability for symbolicity. We will now give our friend a chance here for a while to read.
(15:11)
[HOWARD NEMEROV:] Let me illustrate a point. Louis Mumford has this clever comparison when he's talking about the preeminence of language in making us what we are. He says archeologists and anthropologists tend to go for material artifacts and when they can find some flint axe heads they're pleased. But he said suppose that all the words people used left little dry husks like wing covers around, you wouldn't be able to see a flint axe head because there would be all the husks of those used words around. The moment people discovered they could talk what they must've done for millennia is talk. Great discovery, probably at first the whole damn business didn't mean anything, you just recited enormous long chants which other people had to recite back at you exactly the same way. At least if you define your temperament by saying whether you think people did it that way or whether they first said you are an axe or you are a hammer, you're a river, and stuff like that. I had a definition I wrote for Mr. Mumford after reading his book. I said, "The way people invented language was they got together and talked it over among themselves.”
(16:25)
[KENNETH BURKE:] There's another variation on that. Malinowski has what he calls phatic communion which he spells "p-h-a-t-i-c." Which is just communion by disusing language by speaking back and forth under random conditions. I discovered that he could also work from Latin. So people get together by just sitting around and chewing the fat.
(16:52)
[HOWARD NEMEROV:] My wife has a find definition of a committee meeting: RE: chewing the fat.
(17:02)
[KENNETH BURKE:] You were going to offer a few of your statements of the other business. Do you want to do that way now or no?
(17:14)
[HOWARD NEMEROV:] Alright. We'll see how well planned this is.
(17:20)
[KENNETH BURKE:] I want to say in advance that this is an article that I think is a piece of what this fellow always does. It's a marvelous piece of work. And he keeps you on your toes all the way through. And it's a piece of luck tonight that he's going to—
(17:43)
[HOWARD NEMEROV:] You give me a slice of embarrassment that I keep flattering the hell out of the master who conned me to write a piece about him.
(17:51)
[KENNETH BURKE:] Wait a minute. Wait a minute. I'll move ahead. Here is the way he flatters me. (by Birch Riley)Everything is in movement and development. Everything is always being used for all its worth, and sometimes maybe more. The world's just come to an end just before he got those last four words out there.
(18:22)
[HOWARD NEMEROV:] We thought originally that this might be a way to begin things. If you can take the shameless flattery with which I butter him up. The point being to see how many sentences I got through before he couldn't stand it and started. In one, perhaps accidental, symbolic act Burke expressed his essence. He has some of his early books reissued by Hermes Publications and indeed, it turned out afterwards he said he indeed named the publisher that. Hermes was originally a boundary stone. Just a little rock to show you where your land left off and your neighbor's began. The he grew a face and a beard, as seen in illustrations in classical dictionaries. You haven't got the beard yet, but—
(19:14)
[KENNETH BURKE:] This'll do.
(19:17)
[HOWARD NEMEROV:] Alright. And he went on to become the Roman god of boundaries who was called Terminus. Rising still further, he became Hermes Trismegistus, thrice greatest Hermes who was called that way because he was a king, a priest, and a prophet or legislator all at the same time, all three. “The fabled author,” says Marcoux, “the large number of works called Hermetic books, most of which embody Neo-Platonic, Judaic, and Kabaalistic ideas as well as magical, astrological, and alchemical doctrines.” In other words, everything, preferably all at once. And the dictionary from which I got this description of Burke in his aspect as Hermes identifies him as Socrates does, too in the Pheadras with the Egyptians scribe Thoth. Who had the head of an ape, I believe. Who, above all, says created by means of words. And appears, sometimes, as exercising this function on his own initiative. At other times acting as instrument of his creator. You wanna jump now or you wanna wait a little?
(20:31)
[KENNETH BURKE:] Nah. I can wait.
(20:34)
[HOWARD NEMEROV:] That is a doubt one may properly have about any scribe whose work is imposing enough to make you wonder whether he is representing the world or proposing to replace it. Something I always worried about with respect to John Milton. Put some of my colleagues through some of my experiences with John Milton last term. They were all telling me as soon as i got on to it, I would love it. I finally got back at them by explaining that they had never told me I was reading the English translation. But Milton, for instance, said when he invokes his heavenly muse, claims to merit the instruction by reason of his upright heart and pure. And yet, though it's obvious what is intended is humility, i always heard a certain obstinacy when he said "upright heart and pure," and thought of it as comparable with another of his epithets erected. Well, the doubt may be peculiarly appropriate to a philosopher who creates by means of words and the special sense that he creates words or takes over words, termed, terminologies, the business of Hermes: to set limits. The business of the philosopher, as Socrates defined it most tersely in the Phaedrus where he says, "I guess your way of translation is merger and division." Separating things out or putting things together. When the further inference to be drawn is that there is a way of doing this that is right. The anecdote is very wide-spread. Aristotle has it, too, and it's in some Chinese document I read about the Emperor's Butcher who was so good he didn't need a knife. He just divided things with his hand because he divided them where nature divided them. Then you don't need a sharp edge, it will just fall apart on you because that is right. Well, when you ask whether Mr. Burke does what he does on his own initiative or the instrument of his creator you get somewhat cryptic, though certainly comprehensive reply from his address to the logos where he ends, “For us,/A Great Synecdoche, /Thy works a great tautology.” I think I'll let you explain about synecdoche and tautology all you want from therein.
(23:09)
[KENNETH BURKE:] Yeah, that was a point that I used that in a poem of mine where the whole idea was to work up to those two unwieldy words at the end. Having used the poem several times in readings, I learnt by trial and error that the best way to approach that is first explain how using these two words indicated tautology. explain it along these lines: you have to begin by softening a blow; by synecdoche I here meant a part for the whole and by tautology I had in mind the dialectic fact that the if all creation is the work of the original creative word. What I'm doing here is following the step in theology and God said that there was. That is the creative fiat, which is the creative word. My whole method of working is to try to work from theology without any reference to the truth or falsity of it. But the standpoint of morphology. In other words that I can find statements about God that can be interpreted as statements about words can be used analogically in that way. And that's where the whole problem turns up here about this whole notion of the creative word. You do have a way in which this principle which is used one way in theology as God said let there be and there was and the way that same thing develops in language when you set up a particular set of terms. In terms of which you see something as far as people do see it in those terms you have created that weltanschauung, that view of the world for them. That would be the analogy. So what I did there, the actual poem, maybe I might read the poem because it would give you some general idea of the approach that I work with and this whole idea of the word. this poem is written in a quasi-pious way, but I'm just technically dealing with this problem of the logos, the creative word, and basically this whole idea of the symbol using animal. I might bring out one possible misunderstanding I find people often have about my work, and that is when I speak of the—although I think that for my particular field, the word is the primary area of symbolism that I must deal with. I don't by any means reduce the field to that. I think that dance, painting, music, they're all symbol systems; every one involves the same element. People sometimes have a feeling that there's a fundamental difference between words and these other kinds of symbols. I think we are the kind of animal that approaches the world through all kinds of symbol systems and not all of them just verbal at all. But your logos principle is a good summary for that whole idea. Particularly since in Greek, logos itself has a much wider than just word. It is the whole idea of reason and seeing things in terms of principle. I might suggest as to do with this whole pattern of moving to higher levels and lower levels of generalization which underlies our whole discussion of language in general and poetics in particular. I might read the whole thing. When I get to these last two word, you'll have that which is the only unwieldy words in the whole scheme. Just a little Plutonic dialectic here and you work up to the grand synecdoche as the notion of the part for the whole. And is that name, the great synecdoche, it is just one fragment standing for the whole of the world. and the work's a grand tautology. The idea there is that if the same principle is embodied throughout a work, then it's tautological. It's repetitious in the sense that it will be everywhere. So it carried that out in the standpoint of theology. If the whole universe is a creation of God, then of course God would be manifest in some way or other in every one of its parts. And you get the analogy of that, moving into what I call a step from theology to logology, where you say if you infuse a certain structure with a certain terminology, then of course the whole structure will partake of that one genius and therefore, in that sense, will be tautological. You'll be saying the same thing everywhere you turn.
(29:22)
[Dialectician's Hymn]
Hail to Thee, Logos,
Thou Vast Almighty Title,
In Whose name we conjure—
Our acts the partial representatives
Of Thy whole act.
May we be Thy delegates
In parliament assembled.
Parts of Thy wholeness.
And in our conflicts
Correcting one another.
By study of our errors
Gaining Revelation.
May we give true voice
To the statements of Thy creatures.
May our spoken words speak for them,
With accuracy,
That we know precisely their rejoinders
To our utterances,
And so my correct our utterances
In the light of those rejoinders.
Thus may we help Thine objects
To say their say—
No suppressing by dictatorial lie,
Not giving false reports
That misrepresent their saying.
If the soil is carried off by flood,
May we help the soil to say so.
If our ways of living
Violate the needs of nerve and muscle,
May we find the speech for nerve and muscle,
To frame objections
Whereat we, listening,
Can remake our habits.
May we not bear false witness to ourselves
About our neighbors,
Prophesying falsely
Why they did as they did.
May we compete with one another,
To speak for Thy Creation with more justice—
Cooperating in this competition
Until our naming
Gives voice correctly.
And how things are
And how we say things are
Are one.
Let the Word be dialectic with the Way—
Whichever the print
The other the imprint.
Above the single speeches
Of things,
Of animals,
Of people,
Erecting a speech-of-speeches—
And above this
A Speech-of-speech-of-speeches,
And so on,
Comprehensively,
Until all is headed
In Thy Vast Almighty Title,
Containing implicitly
What in Thy work is drawn our explicitly—
In its plenitude.
And may we have neither the mania of the One
Nor the delirium of the Many—
But both the Union and the Diversity—
The Title and the manifold details that arise
As that Title is restated
In the narrative of History.
Not forgetting that the Title represents the story's Sequence,
And that the Sequence represents the Power entitled.
For us
Thy name a Great Synecdoche,
Thy works a Grand Tautology.
(32:06)
Summing it up that way. There's one thing I might bring in there at that point because I think it's another thing that's going to underlie, I found this misunderstanding that underlies my whole relation to the word and the theory of the word. In a new edition of an earlier book of mine, Philosophy of literary form, I added this notion. It should be brought out to make this clear. I take it that the symbolically tinged realms of power, act, and order—those are the three great schemes or terms that I think have a great set of terminology that develops from a concept of the act, a great terminology that develops from the concept of order, and you have a terminology that develops from the concept of power. They overlap somewhat, but they're all grounded in the realm of motion so far as umbilical existence is concerned. And this realm is non-symbolic, as motion is not in itself an example of symbolic action. It's a symbolic act for a physicist to write about motion or to work out various schemes for analyzing motion and for making things move and so on. But motion itself is completely outside the realm of symbolism. if you don't get that, I'd wish you'd bring it up in discussion period. If you want, we can bring it up because it is a very important point about the whole thing I'm after. And this realm is non-symbolic, except in the sense that man, as the symbol-using animal, necessarily endows everything with a spirit of his symbol systems. I found it necessary to emphasize this point, because, over the years, my constant concern with symbolicity has often been interpreted in the spirit exactly contrary with my notions of reality. The greater my stress upon the roll of symbolism in human behavior and misbehavior, the greater has been my realization of the inexorable fact that in regards to the realm of empirical, one cannot live by the word-bread alone. And though the thing-bread is tinged by the symbolic action, in the sense that we have a name for it, its empirical nature is grounded in the realm of non-symbolic or extra-symbolic motion. In other words, bread makes possible certain weird digestive processes here in the body and motion in that sense?. There is a basic difference between metaphysical idealism and my concern with the word. You see, you can't talk about anything except by exemplifying the rules of talk is not identical with saying our world is nothing but the things we say about it. On the contrary, alas, there's been many a time when what we call a food should have been called a poison. And if our ancestors had but hit upon too many of such misnomers, we'd not be here now. My whole feeling is that the more you study this realm of symbolic action, of the terrific range of things that we do through being a symbol-using animal, the more you realize the last analysis, that the answers are in the realm of the non-symbolic. I think that's really the way this ties in with all these people who are worrying about ecology and so on. You can go on and sell yourself this idea or that idea, but if it's poison, it's poison no matter what you call it. And that's the way it will work out. I think that this the whole environmentalist emphasis that's coming up now just fits completely into the attitude that I have here, where you watch the comedy of human word-using. And you see it on the edges of the terrific tragedy when you do get this misnaming. Ultimately, it leads you to a little vision of crossing the jumping off place where you just realize that words be damned. The last analysis we live or die just as bodies. And that's exactly what we're facing in this whole issue now. We can go on and blow horn about doing this or that, but there is the final test. Are our names accurate or are they not? Insofar as they're accurate, they give us a chance to pull out of this thing. Insofar as they're not, we're down the drain. But the question is ultimately in realm when I mean the realm of sheer motion. Is the body being poisoned or is it not? no matter what they call it; they can call it food, they can call it the future. Is it being poisoned or not? Are we destroying our rivers or are we not? That is the element. That is what I mean by this whole feeling of the marvels of symbolism. Every single symbolic structure, every act of genius, every great drama, every great novel, and so on. there you see all this tremendous scope and mystery and genius of these works. And yet in the last analysis are these bodies being taken care of or not. And that is what I mean. That is purely in the realm of motion, not action. Now, the motion category looks like action, but that be so much in the use of the symbol-using animal, we endow nearly everything in the world with a symbolic content. But that's not intrinsic to the material itself. that's just the way we approach it, but that's the particular kind of animal that we are. You're allowed to go on, friend, if you get a chance.
(39:08)
[HOWARD NEMEROV:] Is there some place to go? I understand that you must've bet on a bad physicist or something if you're protesting so much about believing in motion. In that same book of philosophy of literary form, you divided language up in uses as dream, prayer, and chart. I suppose what you mean is you mustn't contradict the chart so hard it kills you by dreaming or praying things that just aren't in the situation. That relation's a fascinating one. Christopher Caudwell says about the tribes that do the rain dance, says, “They do it just before the rainy season and they don't do it in the dry season.” And as I think this guy's somewhere said, “With our technology, we tend to think of other civilizations' primitive people as inferior. And yet, the odd thing is that turning it around. How much nature allows for. It won't kill you off, there's many mistakes that don't kill you.” Your chart can be wildly astray and full of psychotic influences. These people just go on living in the same manner. Whereas our beautiful notions have brought us quite close to the apocalypse. While we are saying that people thought as the year 1000 approached, they thought that the destruction of the world was immanent. and weren't they superstitious to think that? Now, as the year 2000 approaches, we think, "Well, it's quite reasonable. We're allowing the extra thirty odd years for the round numbers sake. The whole thing might blow up in our faces, then or before then." Of course there's a nice relation there because you can't expect the millennium until you have a calendar. And there you get your symbolism coming in.
(41:08)
[KENNETH BURKE:] Well I guess that little analogy fits in there with that part this way, too. You take the absolute absurdity of the world we're in. You give somebody a couple of dollars and they can go into a supermarket and buy some food. He feels himself so confounded superior to a primitive tribe that can make a living in the wilderness. And this ass couldn't do anything.
(41:43)
[HOWARD NEMEROV:] That includes us, too.
(41:48)
[KENNETH BURKE:] I use that example is like a guy getting delusions of grandeur when every time he walks into the supermarket, the doors open of themselves. It's like, "I did that!"
(42:10)
[HOWARD NEMEROV:] I made up one couplet that I beg leave to intrude on this situation and thus to destroy everything. I came on with lots of couplets, just in case. This is called "Creation Myth." I've got one that's shorter than his, you see. It's on the idea of moebius band, where you can go from inside to outside without crossing an edge and back again. It says:
This world's just mad enough to have been made
by the Being His being into Being prayed.
You can have a copy and play and wrap around. Not the sort of thing you want to tell anybody. Time's for questions from the floor, I dare say.
(43:15)
[KENNETH BURKE:] It might be a good chance to let someone come in at this stage. Start from the other end. We can go on if we have to. Glad to get someone from the other end. That's what we're all here for. We're made to pop up. You want to say anything? Yes?
(43:36)
[AUDIENCE MEMBER 1:] I wish you'd to go back to the beginning and explain the relation between symbols and alienation?
(43:42)
[KENNETH BURKE:] Between symbols and what please?
(43:44)
[AUDIENCE MEMBER 1:] Alienation.
(43:45)
[KENNETH BURKE:] Alienation? Oh. What I was getting at there, I was saying that after you get a highly developed property structure, you can get alienation simply because of the fact that they property structure is out of align with the needs of the situation. The rational structure no longer seem rational to them. Whenever you've lost a sense of rationality to that extent you're confronting a feeling of alienation. What I was getting at is that I think that the beginning of alienation are further back. The very fact that we can develop all this elaborate departure from mere conditions of living are involved in this thing that I'm talking about. That by the very fact that we spontaneously approach everything from a standpoint of a symbolic film that is between us and those things. You might put it in this way and the simplest way in my own field: maybe you don't have a name for everything, but you think of everything as nameable. You could if you knew enough, you'd have a name for it. We just approach everything from the stand point of nameability. Go ahead.
(45:24)
[HOWARD NEMEROV:] Here's a nice illustration that Burke had of the difference that I thought is definitive. Notice, one corner of the world is a hurricane and the newspapers report it. Buildings are blown down, lives are lost, crops are destroyed, land is inundated. And the newspapers said, "It is estimated that there'd been five million dollars worth of damage." Five million dollars lost. He says, "Next day, the stock market goes down and it is estimated that the losses total five million dollars." Now you can see that one set of losses is what you'd call natural or real. The other has something to do with a symbol system. People hadn't lost things in exactly the way that they did in the hurricane.
(46:13)
[KENNETH BURKE:] Yeah, to carry that out a little further, I actually saw once after a big hurricane that went through New England and I saw an article on the financial page of the New York Times where this man writing there talked about the losses due to that hurricane up there through New England. It was some terrific number, billions of dollars, and this fellow says, "After all, that's just about what we lost in the market slump of 1929." When the market slumped in 1929, every single piece of property was there, there was no loss at all, you see, from this standpoint of this real realm. The losses were purely symbolic. Just all these twists in ownership and so on. And yet every single thing was there. And people so spontaneously think in symbolic terms in our system that they can't discount things like that. This is the great lie. This is the great deception between us and the state of nature. Yes?
(47:45)
[AUDIENCE MEMBER 2:] Then what is the link, then, between those consequences which were very real and not symbolic of the stock market crash? How do you get from the symbolic loss to the very real consequences?
(48:02)
[KENNETH BURKE:] the fact is that so far as the place was not destroyed, you had the actual reality of the conditions. In other words, you still had all the resources there and that's where people could go on living. They had to do new tricks of symbolism versus the government bailing out the people who were in debt, bail them out if they had big enough debt. If they had little debts, they weren't bailed out. they could take sell apples, but if anybody, really a big railroad or something, was in trouble, got bailed out. And just the way the fence set, really. The conditions are the same, but you have all these resources, all the symbolic manipulations. Because the whole monetary structure is, of course, an example of symbolism.
(49:01)
[AUDIENCE MEMBER 2:] This is a good instance of alienation, right?
(49:05)
[HOWARD NEMEROV:] Here's an illustration for a change that's not from you, but it's funny. Sherman Arnold has a book called The Folklore of Capitalism, which used to be very popular and still worth looking at. It was written on the basis of that depression. He said, "You’d think that anybody'd know the difference between a horse and a duck. But," he says, "suppose a situation where ducks are taxable and horses aren't. Then you will find people bringing their ducks out of the barnyard and putting bridles on them and saddles. Walking them around and proclaiming that it is obvious to anyone that this animal has been a horse from all eternity."
(49:56)
[KENNETH BURKE:] That, of course, is the marvelous way in which that comes to a focus and leads to alienation is when the corporation is made a person. When we set up the constitution, there were no such things as corporations. The word doesn't appear. It was much later that all these rights were guaranteed to the person, in the individual human sense, were transferred to a legal person. And when you transfer them to a legal person you get a whole new bag of tricks which don't even have anything to do with the reality of the situation. I know personally a man who divided himself into two corporations. And he had the most marvelous method. He was a publisher. He would make a deal with a writer and would give them a very tempting contract. Little clauses in the contract said he could—under uncertain, not too clearly specified conditions—sell the rights to another corporation. If he did so, there were changes in the schedule of royalties and so on. He was both corporations! He signed up this handsome contract with a chap as one corporation and sold it to himself as the other corporation. And there went the royalties down the drain, just by using this symbolic action device. This is one of the resources of symbolic usage. You can see how naturally it makes for alienation. Your turn, Howard. Unless somebody wants to say something. Here's somebody.
(52:30)
[AUDIENCE MEMBER 3:] I wonder if you'd care to comment on your conception of man's symbolizing ability as a source of his alienation in relation of say, Ernst Cassirer on that same idea. Do you find Cassirer to be someone important to you way of thinking?
(52:48)
[KENNETH BURKE:] The only basic place where I would deviate from Cassirer and his idea of the symbolicum is that the whole post-Kantian line—see, I make a distinction of this. I start this theory of symbolic action, I thinks of primariliy starting from an idea of language, not primarily as a field of knowledge, but primarily as a field of action. I view this as a kind of instrumentality that was developed by a tribes' modes of cooperation and competition. In other words, it was essentially ways of persuasion and dissuasion. Getting people to help you on this enterprise, and away from that enterprise. Don't do this, do that. But basically, of that sort. The Kantian line is what I would call dramatistic because the essence of it is an action. That's the same of my whole theory of poetics, also. Because in that whole scholastic line, act and form were equated. Act equals form, and of course if you start to work with pieces of literature and poetry and so on, the first thing you're doing is asking about form. How does it go from here to here? Rather than asking if it's true or false. I don't think truth or falsity is the main test. I think that verisimilitude is a much more relevant test than truth in that particular realm. Sometimes the very fact that something is true will help it to have verisimilitude, but it doesn't necessarily have to work that way. But your Kantian line, which Cassirer is in, is a grand line and I think that Kant's "Prolegomena to any Future Metaphysics" is one of the basic books. But it starts from a problem of knowledge, rather than this question of action. And to that extent, I would call it scientistic rather than dramatistic. The way that turns up in the history of the subject starts in epistemology, which is actually the question of knowledge. And I think that this whole line has this epistemological emphasis. Which is to me from the standpoint of the kind of problems that I have to deal with primarily matters of form and dramas and so on. It's a round about way of getting at the subject. I first have to ask myself, "What's going on here? How are you leading, pointing the arrows? How are you getting people to expect this and be gratified by that? And want this character to get bumped off and want this character to be saved?" and things like that. You got a whole group of dynamic questions developed that way, you see where we're going. If you start from the knowledge end, I think you do a better job. You’re much more direct there than if you're just dealing with the scientific nomenclatures primarily. This scheme starts with poetic problems, not scientific problems. Now, it becomes scientific in the sense that anything you say insofar as what you say is accurate, it's a contribution to knowledge. It's the question of where do you go into it. How do you get into that whole subject.
(56:55)
[HOWARD NEMEROV:] I think we ought to cut down to what we agreed was your [unintelligible]. I could introduce it with something that occurred to me: that poetry is like an eccentric filing system.
(57:09)
[KENNETH BURKE:] Since the time is up, I have what i was telling my friend, Howard Nemerov, this is a particularly a good poem to end on, after you've been in a conference for three days. I've found then that it almost goes over extremely well. But maybe an hour will be good enough to do that. It's called "I'm Putting Things in Order"
File this, throw out that.
Alert the secretariat
Idre each claim and caveat
To better serve the cause of alphabet
Throw out this, file that
File this, throw that out.
We know beyond all doubt
How perfect order reconciles
And now, throw out the files.
Now, let's go home.
(58:13)
[CROWD NOISES WITH KB HUMMING TO HIMSELF AND SHUFFLING PAPERS]
- 21347 reads
Pentadic Leaves
Steven B. Katz, Clemson University
Text of Pentadic Leaves written for and delivered at the Kenneth Burke Society Conference, Saint Louis University, 19 July 2014.
I> SCENE
Terministic Tree:
Spring, Summer, Autumn, Winter
It's green and moody.
Leaves rattle the air.
Trees rattle the clouds.
A breeze is moving
through the tree.
A wind is moving
through the clouds.
But nothing happens.
There is a tension in
the leaves; there is
attention between
this tree and
the next. The leaves
pale and thicken
like cloud.
But nothing
happens.
Now a breeze
rushes through
vowels that quickly
gather at the roots
like forsaken words.
A wind
crashes through consonants
of rock and wood
(not teeth and bone).
There is motion
in the tree. There is
causality in the cloud.
But transcendence?
Perfection?
A branch of sentence
flickers in the cloud,
breaks off, falls
down, is absorbed
by the deaf
ground, freezes
without an attitude,
without a gesture, without
a further sound.
II> AGENT
i
Consubstantial Division
(in the "Tragic Frame")
This is me in winter
a white wind which
twitches like witches, which
groans and moans, which
complains and whines
a noisy tabula rasa,
mistaken "negative capability,"
embarrassed presence and absence,
"trained incapacities"–
a green screen gone dark
and cold: a void of snow
that is me and mine,
wholly together
alone
ii.
"Recalcitrance"
In time's yoked yule
when lives are jangled,
snow bells dragged
as dry as broken crystal;
when green red days
are rung in dust,
and human thought
now turns to rot;
hands thick with cold
like slabs of clay,
prepare our lives
for another day;
then comes the new year
like a god,
to cheer us on
to faith and sod.
III> AGENCY
"Counter-Statement" (also in the "Tragic Frame")
'A Mind of Winter'*
A night full of flurry and thought:
black houses, black pine trees, become depressions
in the dark, branches etched
by ghostly winds made half-
visible, stenciled in air,
the world abstracted in the snow.
I see my reflection in the sky
with a small dull lamp behind me,
my hand moving across the void,
inscribing what I behold and cast
in fields of glass, transparent masks
covering the land below.
The sun will clarify, show things right,
melt these altered images
that haunt instrumental sight, these flakes
engraved on a disappearing
pane, this breath that now makes me blind,
these words imprinted in terministic ice
IV> ACT
i
Hierarchy and Identification
The Spark of Being/Lost
First, one foot, then the other, begins;
then the leg, each leg, swivels
around and under, collapsing, quivers,
gives into hidden pits of oblivions.
And in the wilds of your backyard
you are lost, stumbling through
your neighbor's grass, crawling toward a spark of dew,
rain on every blade piercing your
piety, your congruous perspectives, your rhetorical conscience
as you fall, your physiognomy interpreted, your biological base
becoming your ambiguous orientation, your dancing face
the symbolic act of an animal that grasps at language awk-
wardly, a tragi-comedy of hierarchies, a drama of attitudes providing motives
as unsubstantial as angels, talking to ourselves, a swaggering torso
movements turned into symbolic action, and so much dust, is
ii
Counter-Nature: Analogic Extension of Technology in "the Comic Frame"
By sheer repetition, imitation, mimesis, you will remember
your subjective routine, your technological psychosis, rising from your bed,
extending your counter-nature into the giving air
sideways transcendence to whose knows where…
one morning you'll awake without a body; —and unlike your ancestors
crawling, stumbling through the forest— reach out into space; and conscious,
trying to maintain your regimen, your linguistic nature, you'll
think yourself toward the bathroom, where . . .
you'll reach (without a hand, or a nipple)
for a toothbrush that is now a lion
and the clothes you laid out to be ironed, Orion,
that ironically have become unnecessarily supple
where physics and language meet to form a panoply
of screens from which to view the motives of your anatomy
and analyze the material of your autonomy
as you float in the ethics of planes of incompatibility
V> PURPOSE
Substance: "A Retrospective Prospect"
Where We Came From, Where We Go from Here
the forest floor is churning
quietly as the leaves
of deciduous trees are turning
into light brown ground,
soft conifers shedding
their pine needles, one by one
cover earth with stubble,
quickly convert old leaf meal
into decay, wood crumble
whereby twigs and branches, trunks
slowly blur and melt and
whole trees become little stumps that bump
against the tiny tips and stalks
of buds that gather, grow, rot
inward, reaching down, then sprout
balsam wings like little motive arrows,
and (since "all living things are critics")
point, protect the way for sparrows
into futures whose "attitudes towards history," altitudes of hierarchies, spread, conceal
a sky so full of transformations that the slow green
lives and logologies of word-trees will rise, congeal
into a substance of ideas and sounds whose ratios are
the apparatus we create and we don't yet understand,
new symbolics of rhetoric and grammar
where language and physiognomy explode in a biology of stars,
sprouting multiple parallels, the nerve centers of universes
in bodies no longer like ours, but are
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
*Title adapted from the first line of Wallace Stevens, "The Snow Man"
- 19019 reads
When Actions Collide: Motive Constructions Spanning Different Acts
Clarke Rountree, University of Alabama in Huntsville
Abstract
While Burke examined the relationships among the terms of the pentad within a single pentadic set (i.e., a single "act"), a few rhetorical critics using pentadic criticism have noted grammatical relationships that cross between pentadic sets (multiple acts). Yet no one has theorized about those multipentadic relationships. This paper provides a basic explanation of how such multipentadic relationships work in strategic constructions, using many illustrations from public discourse.
EVERYTHING IS CONNECTED TO EVERYTHING ELSE, AS THE TRUISM GOES. This idea is reflected in concepts such as "the butterfly effect" which describes how the most minor changes in a situation (e.g., a butterfly dying) can have unforeseen consequences in the future (given the connection of everything to everything else, in one way or another). The same concept of web-like relations appears in games like "Six Degrees of Kevin Bacon," which plays on the philosophical concept of "six degrees of separation," suggesting that people have connections through other people (either to Kevin Bacon's films or interpersonally to everyone else on the planet). That web of interconnectedness has at least two distinct dimensions: the causal connections that scientists focus upon and the human relations which cannot be reduced to mere causal relations. Of course scientists have tried to reduce human action to mere motion; however, as Kenneth Burke has noted, any such reduction loses what is unique about human action which, he insists, cannot be reduced to motion.
When we try to explain something in the world, we necessarily carve out some segment of that web in the explanation. For example, if I provide a causal explanation of how I sunk the eight ball in the side pocket in a game of pool, I don't start with the origins of the materials that make up the billiard balls, cue sticks, and table; or the construction and placement of the table in my house, or what I had for breakfast that gave me the energy to hit the cue ball. I say something like: "I kissed the side of the eight ball with my shot, nudging it into the corner pocket." Exactly what counts as relevant and proximate in such explanations is subject to debate, of course; but the whole idea of explaining circumscribes what is expected.
When it comes to parsing webs of human relationships, Kenneth Burke has given us a conceptual framework. He suggests we distinguish particular acts and their corresponding agents, agencies, purposes, scenes, and, when useful, attitudes (on this last term, see Burke, Grammar, 443). That is, he tells us to look for what is done, who did it, how she or he did it, why, when, where, and in what manner. The pentadic terms and the questions they represent are grammatically connected to one another so that a pentadic set, or pentadic "root" (Birdsell), is formed that circumscribes relevant elements. For example, if I say, "Jill drove John to the movies," I cannot say that the act of driving is something that John did, because Jill is the agent of that action in this construction. But if I am describing the action, I have the option of characterizing elements in a way that reduces Jill's agent role, such as saying, "Jill, a student driver, drove her watchful father John to the movies."
Burke was interested in the inventional resources available to rhetors in the construction of such actions. His A Grammar of Motives describes those resources and undergirds our understanding of the rhetoric of motives, where rhetors get to choose how to answer the pentadic questions with respect to a given construction of motives, stressing scene or agent or purpose or another term as dominant in accounting for motives in a given case. The relationships among the terms are considered in pairs, or ratios, to show how one element transforms our understanding of another. Thus, a scene may be shown to contain an act, an agency may be adapted to a purpose, a particular kind of agent may be said to be responsible for a corresponding kind of action (heroic, foolish, selfish, etc.), and so forth.
While this Burkean account of action and its corresponding approach to rhetorical criticism is well known, I wish to build on Burke's theory and method to account for a common but much more complex rhetorical phenomenon: the construction and strategic connection of multiple pentadic sets. Because, as I have noted, everything is somehow connected to everything else (including different actions), it is unsurprising that rhetors often construct more than one act and place those distinct acts in relation to one another. To take a simple but fateful example: President George W. Bush said that President Saddam Hussein of Iraq was constructing weapons of mass destruction (Act 1, undertaken by Hussein), he announced that the United States was going to war to stop him (Act 2, undertaken by Bush), and he claimed that Act 1 created a dangerous scene that necessitated Act 2.
To distinguish these different acts, I will use the term "pentadic sets," rather than Birdsell's "pentadic roots," because, theoretically, the same act could be constructed by different rhetors who feature different roots. For example, the "Do-Nothing" Congress dominated by Republicans in President Obama's second term might construct legislation he is proposing by emphasizing who is proposing it (agent), while a supporter might emphasize what it tries to accomplish (purpose). Each side highlights a different root. A pentadic set, by contrast, emphasizes that particular grammatical constructions serve to distinguish unique acts that have their own grammatically-related terms covering scene, agent, agency, purpose, and attitude.
Of course, as this paper will show, some of the terms of one pentadic set may be shared with different pentadic sets; however, no two pentadic sets will ever share all elements. Even the factory worker who makes the same widget day after day can be said to engage in different acts owing to the fact that, on different days, she will find herself in a different scene (a day later), a different agent (a day older, married between working days, changing party affiliations), and may have a different attitude (one day happy another sad) or may use a slightly different agency (a new wrench), etc.
Although rhetorical scholars have examined particular inter-pentadic constructions before, they have said very little about the practice in general. This essay theorizes such constructions with respect to actions that are connected for rhetorical purposes. It illustrates the forms that connections between acts may take and explains why they are rhetorically powerful. And it considers the need for rhetorical critics to take notice of this form of motive construction.
Grammars of Motives
Burke only hints at connections across different pentadic sets in A Grammar of Motives. For example, in discussing Eugene O'Neill's play, Mourning Becomes Electra, he notes: "When Lavinia instructs Seth to nail fast the shutters and throw out the flowers, by her command (an act) she brings it about that the scene corresponds to her state of mind. But as soon as these scenic changes have taken place, they in turn become the motivating principle of her subsequent conduct [i.e., additional acts]" (9-10). Burke's focus in the Grammar on providing a basic explanation of the pentadic terms and their connection in discourses about action (including much of the Western canon!) did not lead him to examine more generally how such acts may be related to another.
Rhetorical critics employing Burke's pentad have occasionally considered the relationships that prevail among different acts described by rhetors. For example, in his classic analysis of Senator Edward Kennedy's tragic accident at Chappaquiddick and its aftermath, David Ling describes two pentadic sets connected by Kennedy. The first involves the accident and Kennedy's subsequent actions, where a narrow, poorly lit bridge over cold, rushing water is blamed for the accident, for Kennedy's inability to save his passenger, Mary Jo Kopechne, and for Kennedy's disorientation, which, he urged, led to a failure to report the accident for eight hours. As Ling notes, Kennedy invokes the scene as controlling his actions. But, after recounting this construction, Kennedy puts his future into the hands of the people of Massachusetts, asking them to decide (in this second act) whether his actions warranted a decision that he remain in office representing them. Kennedy's constituents, in other words, were asked to act in a new scene in which their senator might be viewed in a different light. To the extent that he constructed his disoriented action as beyond his control, perhaps he could be forgiven and allowed to continue to serve the State of Massachusetts. (It also did not hurt that the agency of supporting or rejecting Kennedy was weak, involving sending letters of support or rejection to the Senator or, perhaps, to the local newspaper; and he was the ultimate judge of whether the State had "spoken" and what they "said.")
Colleen E. Kelley also conducted a study of a politician in trouble which looked at multiple pentadic sets. Congressman George Hansen of Idaho was constructed by the media as a crook after he was charged and convicted for filing false financial reports. But he managed to use that conviction as evidence of a federal conspiracy against him to win reelection. Kelley does not explicitly discuss the connections between the two other than indicating how the media's construction of Hansen required him to respond to a scene within which he was viewed by many as corrupt. She does show that he did so by actually using his conviction as a campaign point to demonstrate that the government wanted to get rid of him because he was crusading against it.
David S. Birdsell looked at two different acts constructed by Ronald Reagan following the deadly suicide bombing of over two hundred U.S. Marines in Beirut, Lebanon and his subsequent decision to invade the tiny Caribbean nation of Grenada. Birdsell notes that the two acts were framed differently, but were reconciled by Reagan "in the context of his elliptical remarks on foreign policy at the end of the speech" (267-68). Birdsell's analysis of Reagan's constructions was "complex and 'layered,' featuring a different pentadic 'root' for each portion of the speech."
My own work has featured some of the most complex constructions of multiple, related pentadic sets. In my analysis of the U.S. Supreme Court's Japanese internment case, Korematsu v. United States, I argued that "[t]he chief rhetorical work of the judicial opinion…is to embody and characterize actions" (Rountree, "Instantiating 'the Law'" 3-4). Among the most important of the characterized actions are constitutions (enactments of their founders), laws (acts of legislatures), precedents (acts of former courts), acts of litigants (such as the crimes they are alleged to have committed), and the acts of the government (e.g., law enforcement officers, prosecutors, regulators, etc.). Embodied actions, I argued, are those of judges handing down opinions. They must appear judge-like, speaking to the law, to justice, and (for appellate courts) to future interpreters of law (who may cite them). I extended my discussion of judicial constructions of action in a book on the Bush v. Gore decision, which ended the recount of presidential ballots in the 2000 election, awarding the presidency to George W. Bush (Rountree, Judging the Supreme Court). I showed how majority, concurring, and dissenting opinions connected a wide array of actions (by the Founding Fathers, the Florida Legislature, the Florida Supreme Court, the U.S. Congress, and others) to construct their disparate views of what law, justice, and good precedent requires.
None of this work, including my own, has grappled more generally with what is involved when distinct pentadic sets are constructed by rhetors and connected. This paper seeks to remedy that.
Constructions of Relationships between Acts
The most common way relationships are constructed between different acts is through a terministic bridge connecting two acts. That is, the first act constructs an element that becomes a scene, agent, agency, purpose, or attitude in a second act. Such terministic connections across pentadic sets may be very complex and rhetorically sophisticated. I will illustrate the terministic possibilities for each of the pentad's "bridging" terms.
Constructing Scenes
One of the most common inter-pentadic constructions involves a first act that creates a scene to which a second act must respond. American foreign policy is built around the idea that we only engage in defensive wars—wars ironically pursued in the name of peace. I have noted the example of President George W. Bush's invasion of Iraq before, where he constructed Iraq's actions as threatening and the U.S. response as defensive and reasonable. Another example comes from President Bill Clinton's decision to launch air strikes against the same country in 1998. Clinton's scenic justification was crucial because he was embroiled in the Monica Lewinsky scandal at the time and critics saw the strikes as an attempt to distract the country from his problems. In a nationally-televised address on December 16, 1998, Clinton showed how actions by Iraq's leader, Saddam Hussein, created a scene that required action:
Six weeks ago, Saddam Hussein announced that he would no longer cooperate with the United Nations weapons inspectors, called UNSCOM. They're highly professional experts from dozens of countries. Their job is to oversee the elimination of Iraq's capability to retain, create, and use weapons of mass destruction, and to verify that Iraq does not attempt to rebuild that capability. The inspectors undertook this mission, first, seven and a half years ago, at the end of the Gulf War, when Iraq agreed to declare and destroy its arsenal as a condition of the cease-fire.
Clinton noted that Hussein had used WMD before, on his own people, "not once but repeatedly, unleashing chemical weapons against Iranian troops during a decade-long war, not only against soldiers, but against civilians." Given Hussein's actions and his past history, the world was faced with a dangerous scene, Clinton urged:
This situation presents a clear and present danger to the stability of the Persian Gulf and the safety of people everywhere. The international community gave Saddam one last chance to resume cooperation with the weapons inspectors. Saddam has failed to seize the chance. And so we had to act, and act now.
That action, he explained, involved "a strong, sustained series of air strikes against Iraq. They are designed to degrade Saddam's capacity to develop and deliver weapons of mass destruction, and to degrade his ability to threaten his neighbors." Thus, Hussein's earlier actions created a scene that contained Clinton's act of ordering air strikes to change that dangerous scene.
Another act frequently citing as changing the scene for future actions was the terrorist attacks on September 11, 2001. Those attacks came several months after the most contested presidential election in U.S. history in which a bloc of the five most conservative justices on the United States Supreme Court ordered that the state of Florida stop recounting ballots that might have given Vice President Al Gore a victory in the 2000 presidential election. George W. Bush's inauguration was so controversial that for the first time in history the Secret Service declared the ceremony a "National Special Security Event," which required anyone attending the inauguration to have permission from the government (Greenfield, 298). Bush entered the White House as an agent whose presidential legitimacy was in question.
However, after the attacks of 9/11, his agent status changed. As Mark Miller, writing for the National Review, noted:
[A]ll questions of legitimacy suddenly vanished. In an instant, the controversy over hanging chads came to seem remote and inconsequential. The warnings about the stability of the American constitutional order were rendered utterly beside the point as the country absorbed far greater blows and survived with its constitutional integrity intact.
Thus, Miller argues, the terrorists' acts changed the scene; that scene altered our understanding of agent Bush from one of questionable legitimacy to a well-supported commander-in-chief who was then able to wield his authority boldly in subsequent acts of retribution against our attackers and those who harbored them.
Constructing Agents
As Burke has pointed out, agents and acts are related through a status-actus relationship, whereby who one is determines what one will do. Thus, a hero does heroic acts. Of course the reverse is true as well: acts establish who someone is. Thus, an otherwise nondescript pilot, Captain Chesley "Sully" Sullenberger, became a "hero" in January 2009 after making a successful emergency landing on the Hudson River when his U.S. Airways jet was hobbled by geese sucked into the jet's engines. Subsequent to this heroic deed, Sullenberger was chosen to be the Grand Marshall of the Tournament of Roses Parade in Pasadena, California in 2010. In that act of serving as Grand Marshall, Sullenberg appears as the hero leading the parade (rather than as an ordinary United Airways pilot)—an appropriately prominent figure to lead off this annual event.
Prior actions can cut both ways, however. When President Bill Clinton was accused of having an affair with White House intern Monica Lewinsky, constructions of his prior alleged infidelities (with Gennifer Flowers, Kathleen Willey, and Paula Jones) characterized him as a "womanizer," making his alleged affair with Lewinsky seem more probable (through an agent-act relationship).
Patrick J. Buchanan, who failed to win the Republican nomination for president in 1992 after running against a sitting Republican president, nonetheless spoke at his party nomination convention. And he used a contrast of past acts of Republican George H. W. Bush and Democrat Bill Clinton to explain what kind of agents they are and, thereby, what kind of presidents they would be. He argued:
An American President has many roles. He is our first diplomat, the architect of American foreign policy. And which of these two men is more qualified for that great role? George Bush has been U.N. Ambassador, Director of the CIA, envoy to China. As Vice President, George Bush co-authored and cosigned the policies that won the Cold War. As President, George Bush presided over the liberation of Eastern Europe and the termination of the Warsaw Pact. And what about Mr. Clinton? Well, Bill Clinton—Bill Clinton couldn't find 150 words to discuss foreign policy in an acceptance speech that lasted almost an hour. You know, as was said—as was said of another Democratic candidate, Bill Clinton's foreign policy experience is pretty much confined to having had breakfast once at the International House of Pancakes.
Buchanan's description of Bush's past acts (many of them being something, serving in a role) suggested that Bush would be better on foreign policy (a future act).
Constructing Agencies
Agencies may be technologies, methods, policies, laws, rules of thumb, ethical codes, protocols, how-to manuals, or other types of means for doing things. In the case of technologies, their creation is an act that provides a physical means for undertaking action. For example, Alexander Graham Bell's invention of the telephone was an act making possible subsequent acts of talking on the telephone. However, it is rare that a rhetor would want to refer back to that act (except perhaps on the anniversary of the telephone's invention). But such references are not as rare as you might imagine. Consider David Pogue's review of Apple Corporation's new iPad in the New York Times:
At least Apple had the decency to give the iPad a really fast processor. Things open fast, scroll fast, load fast. Surfing the Web is a heck of a lot better than on the tiny iPhone screen—first, because it's so fast, and second, because you don't have to do nearly as much zooming and panning.
But as any Slashdot.org reader can tell you, the iPad can't play Flash video. Apple has this thing against Flash, the Web's most popular video format; says it's buggy, it's not secure and depletes the battery. Well, fine, but meanwhile, thousands of Web sites show up with empty white squares on the iPad—places where videos or animations are supposed to play.
Here Pogue speaks of what Apple did in building the iPad (it "had the decency to give the iPad a really fast processor") then turns to what iPad users subsequently do in using the iPad (surfing the web fast; seeing empty white squares on Flash websites). Their inventional act yielded an agency that is a means for subsequent user actions—in Pogue's view, an unnecessarily compromised one.
In the case of symbolic agencies, such as codes, laws, protocols, and the like, rhetorical constructions may suggest that their development, rationale, or purposes require them to be used as guides to present action in a particular way. For example, Abraham Lincoln's "Cooper Union Address" spoke of what the Founding Fathers believed in the past about the control of slavery in territories in order to suggest that the U.S. Constitution was a legal instrument that permitted the federal government to regulate slavery in the territories. For example, he notes:
In 1787, still before the Constitution, but while the Convention was in session framing it, and while the Northwestern Territory still was the only territory owned by the United States, the same question of prohibiting slavery in the territory again came before the Congress of the Confederation; and two more of the "thirty-nine" who afterward signed the Constitution, were in that Congress, and voted on the question. They were William Blount and William Few; and they both voted for the prohibition—thus showing that, in their understanding, no line dividing local from federal authority, nor anything else, properly forbids the Federal Government to control as to slavery in Federal territory. This time the prohibition became a law, being part of what is now well known as the Ordinance of '87.
From this and similar evidence of what the Founding Father's intended, Lincoln draws an agency for present legislative action, insisting:
I do not mean to say we are bound to follow implicitly in whatever our fathers did. To do so, would be to discard all the lights of current experience—to reject all progress—all improvement. What I do say is, that if we would supplant the opinions and policy of our fathers in any case, we should do so upon evidence so conclusive, and argument so clear, that even their great authority, fairly considered and weighed, cannot stand; and most surely not in a case whereof we ourselves declare they understood the question better than we.
As I noted previously, judicial opinions are replete with references to precedents, whose "holdings" are agencies that they claim to follow (another court's means becoming its own means of action). But, anywhere rules, holdings, codes, and the like are invoked, we tether together two acts through an agency bridge.
Constructing Purposes
Purposes may be derived from religious texts, planning documents, corporate charters, lists of personal goals, or other ends-related sources. Thus, the Christian who proclaims she will join Doctors without Borders to help victims of the Syrian civil war, for "God's purposes," may construct religious texts, a "calling" she felt, an admonition from a spiritual leader, or another source to explain that this is where her purpose of helping the downtrodden originated. CEOs of Wall Street firms that took incredible risks with exotic financial instruments that led to the Great Recession may point to stockholder meetings where they received a demand to increase profits.
Susan B. Anthony invoked constitutional purposes in defending her present right to vote in an election in Rochester, New York. In defending herself from the charge of having illegally registered to vote, she noted:
The preamble of the Federal Constitution says:"We, the people of the United States, in order to form a more perfect union, establish justice, insure domestic tranquility, provide for the common defense, promote the general welfare, and secure the blessings of liberty to ourselves and our posterity, do ordain and establish this Constitution for the United States of America."
She interpreted what these words meant in noting:
It was we, the people; not we, the white male citizens; nor yet we, the male citizens; but we, the whole people, who formed the Union. And we formed it, not to give the blessings of liberty, but to secure them; not to the half of ourselves and the half of our posterity, but to the whole people—women as well as men.
Having established that "we" meant everyone, males and females, and that the central purpose of the constitution was to secure the "blessings of liberty," she builds on that established purpose to infer a means adapted to that end for present-day women such as her, insisting: "And it is a downright mockery to talk to women of their enjoyment of the blessings of liberty while they are denied the use of the only means of securing them provided by this democratic-republican government—the ballot."
Richard Nixon used others to construct his purposes in his 1952 bid to become Dwight D. Eisenhower's vice president. He had been accused of misusing $18,000 in political contributions. He retorted: "Not one cent of the 18,000 dollars or any other money of that type ever went to me for my personal use. Every penny of it was used to pay for political expenses that I did not think should be charged to the taxpayers of the United States." He cited an independent audit by the accounting firm Gibson, Dunn, & Crutcher, reading their statement:
It is our conclusion that Senator Nixon did not obtain any financial gain from the collection and disbursement of the fund by Dana Smith; that Senator Nixon did not violate any federal or state law by reason of the operation of the fund; and that neither the portion of the fund paid by Dana Smith directly to third persons, nor the portion paid to Senator Nixon, to reimburse him for designated office expenses, constituted income to the Senator which was either reportable or taxable as income under applicable tax laws.
Here, an act of auditing constructs a purpose for Nixon: using campaign contributions for things other than personal expenditures. Nixon constructs the audit as objective and credible. The audit yielded a purpose for Nixon's use of the money (or at least rejected a questionable purpose); that purpose, in turn, becomes the centerpiece of Nixon's construction of his own actions in taking and using those political contributions.
Constructing Attitudes
Prior acts may create attitudes that can bleed over into constructions of subsequent acts, shaping them. For example, unfair or tyrannical actions by a manager may lead to low morale on the part of his employees; that negative attitude may spill over into subsequent actions by those employees. On an individual level, an act may lead an agent to love, hate, envy, or have some other significant attitude towards another person; that, in turn, may be said to shape subsequent actions towards that person.
Like many sharp-tongued political speakers, Texas Governor Ann Richards sought to shape attitudes towards her party's opponent. Vice President George H. W. Bush was running against Democrat Michael Dukakis in 1988 and Richards skewered him at the Democratic National Convention. She argued:
[F]or eight straight years George Bush hasn't displayed the slightest interest in anything we care about.
And now that he's after a job that he can't get appointed to, he's like Columbus discovering America. He's found child care. He's found education.
Poor George. He can't help it—he was born with a silver foot in his mouth.
Richards constructs Bush as disinterested in voter's needs, spoiled, and a poor speaker. She creates attitudes of disdain and, sarcastically, pity (with "Poor George"). The attitudes towards a presidential candidate are generally incompatible with supporting that agent's candidacy.
Constructing Acts
Even the hub of action—act itself—can be said to connect to a previous act. For acts that are constructed as emulating or following previous acts, this may involve some kind of precedent. This is most obvious in the law, where prior cases lay down a pattern for subsequent cases. This connection might be limited to an agency link, where a prior case's "holding" becomes the legal means for resolving the subsequent case, as I suggested in the discussion of agency above. But, it is not always this simple. Often, the agents, scenes, purposes, and even attitudes of a previous act are invoked, so that a complex matching of one act to the other is a more accurate description. Consider Justice Sandra Day O'Connor's dissent in Kelo v. City of New London, an infamous case in which eminent domain was invoked to take the modest homes of residents along a river and give them to a development corporation to help the city's economic fortunes. The majority claimed that prior cases allowed economic development as a justification for such takings. O'Connor distinguished two key precedents, insisting:
The Court's holdings in Berman and Midkiff were true to the principle underlying the Public Use Clause [of the Fifth Amendment]. In both those cases, the extraordinary, precondemnation use of the targeted property inflicted affirmative harm on society—in Berman through blight resulting from extreme poverty and in Midkiff through oligopoly resulting from extreme wealth. And in both cases, the relevant legislative body had found that eliminating the existing property use was necessary to remedy the harm. (464-65)Thus, O'Connor invokes scene (harmful), agency (eliminating property), purpose (remedying a harm), and agent (legislature) in constructing what it meant to "follow" those precedents. Here a well-fleshed-out first act informs what the court should do in its subsequent act.
Other acts are invoked because they provide comparisons for critics or analysts of other acts. For example, past state of the union addresses might be compared to a current one (e.g., Barack Obama versus his predecessor, George W. Bush), past sports records may compared to current ones (Barry Bonds versus Roger Maris on the number of homeruns hit in a season), past acts of government action versus current actions (George W. Bush on Hurricane Katrina versus Barack Obama on the Gulf oil spill), and so forth. During political campaigns, comparisons of candidates' records to their opponents are common, stressing the contrast. As I have noted previously, hypothetical acts may be constructed by rhetors (Rountree, "Judicial Invention" 59-60) providing opportunities for comparing two competing proposed actions (e.g., taxing carbon emissions versus creating a cap and trade system for carbon credit), comparing an existing action with a proposed action (e.g., existing financial regulations versus proposed regulations), or a past action with a proposed action (e.g., putting a moratorium on capital punishment in the past and perhaps in the future). Rhetors may even compare fictional, mythical, or historical accounts of actions to present or future actions (such as when Christian children are told to treat others as "the Good Samaritan" did).
These are but a few of the ways in which acts can be connected. Stokely Carmichael provides a completely different approach in his speech, "Black Power," from October 1966. He references recent killings of three "Freedom Riders" in Mississippi:
On a more immediate scene, the officials and the population—the white population—in Neshoba County, Mississippi—that's where Philadelphia is—could not—could not condemn [Sheriff] Rainey, his deputies, and the other fourteen men that killed three human beings. They could not because they elected Mr. Rainey to do precisely what he did; and that for them to condemn him will be for them to condemn themselves.
How does he explain the failure of whites in Neshoba Country to condemn the killings of the civil rights activists? Through their earlier act of voting in a sheriff for the purpose of maintaining Jim Crow through any means necessary. That earlier action (with its racist purpose) shapes present action (or inaction) so that "for them to condemn [the sheriff] will be for them to condemn themselves." What they did in the past is connected to what they will not do in the present (a hypothetical act that one might expect to follow from the murders).
Rhetorical Advantages of Constructing Multiple Acts
To understand the advantages to rhetors of constructing multiple acts we must begin by considering the advantages of constructing any act. Generally, we see the construction of an act as an effort to portray the act in a particular way. For example, if I am a politician I show that my acts are good and noble and beneficial, while the acts of my opponents are bad and selfish and harmful. If I am a defense attorney I show that the acts of my client were innocent, while the prosecutor shows that they are guilty. If I am a critic I show that the acts of those I would praise are praiseworthy and those I would censure are blameworthy.
Rhetors also construct acts to shape our understanding of those acts, their agents, their scenes, their agencies, their purposes, or their attitudes. A politician may tell the story of a brutal murder to convince voters that they live in a dangerous world. If he emphasizes that the murder was committed by an illegal immigrant, he may be suggesting that immigration policies (an agency of government action) are not working. If he stresses the easily-obtained handgun that was used in the murder, perhaps he is suggesting that our gun laws are flawed. If he emphasizes where the murder took place, perhaps he is segmenting a city into "good" and "bad" neighborhoods. If he emphasizes the brutality of the murder, perhaps he is warning about a new attitude of reckless disregard for human life in our culture.
As Burke has shown, rhetorical constructions of motives work within the grammar of motives, drawing upon the power of act, scene, agent, agency, purpose, and attitude. Because of the grammatical relationships between each term, the characterization of one term will affect our understanding of them all; thus, there are limits to what a rhetor can do in constructing motives, since pulling a construction one way limits how far the other terms can be pulled in another direction. So, for example, as Ling has shown, Senator Edward Kennedy relied on scene to explain his failure to report the deadly accident at Chappaquiddick in a timely manner. But, having constructed himself as an agent victimized by a scene where a narrow, unlit bridge over cold, swiftly moving water led to an accident and the near drowning of the junior senator from Massachusetts, Kennedy could not promise voters that he was a heroic figure capable of overcoming all obstacles (since he obviously had succumbed to one in a moment of crisis). Kennedy sacrificed a better agent construction to explain his action, hurting his image as a candidate in subsequent presidential races, where Chappaquiddick was regularly invoked to question his presidential timbre.
When rhetors construct more than one act, they increase their inventional opportunities. Consider the Iraq War example from above: Bush could play within the grammar of motives of his "Saddam Hussein is developing weapons of mass destruction" pentadic set (playing up agency, such as the report that Iraq had bought yellowcake from Africa), then use that to bolster his "The U.S. needs to invade Iraq" pentadic set. The Bill Clinton critic could draw on the most credible acts of alleged infidelity by the former Arkansas governor, then use that construction of Clinton as a "womanizer" to conclude, "Of course he had an affair with Monica Lewinsky!"
Judges are among the most sophisticated rhetors constructing multiple acts. In the Kelo case cited earlier, the Supreme Court's majority opinion constructed the Berman and Midkiff precedents cited by Justice O'Connor (Acts A and B) to support their construction of the U.S. Constitution's Fifth Amendment "Takings" clause (Act C, undertaken by the founding fathers) and applied that construction their own act of allowing New London, Connecticut to seize the property of home owners (Act D). They also noted that such takings were permitted by Connecticut law (Act E, by the state's legislature). It was obviously useful for the court to construct the Constitution, federal statutes, and state statutes as supporting their own action in deciding this controversial case. Such constructions build a web of inter-pentadic relationships around judges, entangling their decision strategically to "force" their hand in acting. Once the groundwork is done, they can simply proclaim: "I was following the law in handing down this decision."
Another advantage of rhetoric that draws upon the power of the grammar of motives is that it can be indirect, subtle, and sophisticated. The woman who wants to get her sister to stop dating some guy doesn't have to come right out and say, "He's a womanizer"; instead, she can say, "I think I saw Joe's car when I passed the strip club last night." This scenic reference does the rhetorical work of constructing the agent as a womanizer by (grammatical) implication.
Given grammatical relationships between different acts, such rhetorical strategies can be quite sophisticated, deployed the way a chess master sets up the board several moves ahead to prepare the way to spring a trap. As I have argued elsewhere, the NAACP's Legal Defense Fund deployed a sophisticated, long-term strategy to put in place the elements for overturning the "separate but equal" doctrine laid down in Plessy v. Ferguson (Rountree, "Setting the Stage"). They worked for forty years to develop litigants, litigators, receptive courts, and precedents. They strategically focused on cases where African-American applicants to state graduate schools had been rejected solely because of their race. That allowed them to sidestep problems in public K-12 schools, where states could argue that, indeed, black schools were equal to white schools. There were no graduate schools for blacks in segregated states, so "separate" could not be "equal." A 1914 precedent established that states could not simply argue that too few black students wanted graduate degrees making it economically unfeasible, because the High Court found, equal accommodations is an individual right (McCabe v. Atchison, Topeka & Santa Fe R. Co.). When states began to throw together graduate programs for a handful of black students, it was easy to show that these extremely limited programs (limited in faculty, resources, course offerings, etc.) were not equal to those of hundred-year-old, esteemed programs such as that at the University of Texas Law School (Sweatt v. Painter). Constructions of state acts of not providing graduate education, of providing poorer education to African Americans, and of showing racial animus in these efforts, were easy to develop by the LDF's lawyers, setting the stage for a reversal of Plessy's doctrine for all public schools in Brown v. Board of Education.
This last example adds an interesting twist to the construction of multiple acts: that rhetors may actually become involved in creating the acts, scenes, agents, agencies, purposes, and attitudes they later construct, doing things that materially change conditions that they later would invoke symbolically. As I have noted elsewhere, Burke accounts for such nonsymbolic strategies coupled with the symbolic in his discussion of Machievelli's "administrative rhetoric" in A Rhetoric of Motives, noting: "[t]he persuasion cannot be confined to the strictly verbal; it is a mixture of symbolism and definite empirical operations" (158). I illustrated this form of rhetoric with President George H. W. Bush's rhetorical strategy to move the United States to war against Iraq's occupation of Kuwait in 1990-1991 (Rountree, "Building up to War").
Bush already had sent 100,000 troops to Saudi Arabia to prevent Iraq from moving its invasion into the territory of this oil-rich U.S. ally. But Congress was balking at Bush's plans to move from a defensive force to an offensive force and place American troops into combat. Senator Sam Nunn, the Democrat from Georgia who chaired the Senate Armed Services Committee, favored giving time for sanctions to work. Bush's strategic move was to wait for Congress to recess and then to order a doubling of the troops in case an offensive force was needed. Grammatically, Bush's actions changed the scene dramatically: members of Congress heard complaints as National Guardsmen were called up to service for an unknown period. News stories of mothers in the Guard separated from their young children played up the sacrifices, placing pressure on Congress to do something. But Bush's actions had upped the ante in the war and made backing down nearly impossible. As former Secretary of State Henry Kissinger told "This Week with David Brinkley": "Once 200,000 troops were sent there, we could not withdraw these troops without achieving our objectives without a collapse of our entire position in the Islamic world and the high probability of a much more damaging war."
By the time Bush addressed Congress in January 1991 to ask for their approval to engage in war with Iraq, the table had been set. He could describe a scene he himself had created as one requiring action.
Developing scenes that one later invokes is one possibility. Rhetors also can create agencies, such as weapons to be used later or precedents to be invoked; they can create purposes, as JFK did in calling for a mission to the moon; they can establish agents, such as appointing people to positions where they are poised for action; they can help create attitudes, as Reagan did over years in calling "big government" our biggest problem; and they can engage in, or encourage others to engage in, acts that may be invoked as precedents, examples, counter-examples, and so forth. Bringing such administrative rhetoric into the mix opens to the door to some complex and often long-term strategies of persuasion.
Conclusion
I have argued in this journal previously that Burke's pentad offers a literal description of how humans think about action, insisting: "No recognizably human society ever existed that was not able to draw the distinctions we draw in answering the questions Who, What, When, Where, How, and Why. In other words, these questions and the answers they call for are universal in human societies" (Rountree, "Revisiting the Controversy"). If I am correct, then how we think and talk about action necessarily works within the grammar of motives described by Burke. Thus, if rhetorical critics want to understand the logic undergirding the strategic constructions of motives that pervade human discourse, such analyses should yield an understanding of the inventional possibilities of the rhetoric of motives.
Even if we set aside my position that Burke's grammar of motives is universal, we at least should concede its heuristic value in framing analyses of particular constructions of action. Whether our use of Who, What, When, Where, How, and Why is implicit in the very idea of action or not, these questions undeniably pervade and usefully frame our discussions of action, as this essay has illustrated through a variety of texts.
Of course identifying the grammar invoked by a particular discourse alone is only a starting point for rhetorical analysis. What Anderson and Prelli call "pentadic mapping" reveals the structures of meaning in talk about action, showing that some discourses are privileged while others are marginalized. It is for the critic to explain why it matters that it is easier to talk and interpret some ways than others, whether that involves ideological hegemonies, muted voices and groups, preferred ontologies, favored constructions of knowledge, or something else. Pentadic mapping may ferret out more than strategic constructions of motives, getting at language practices that think for their users, leading them "logologically" through the verbal telos of a terministic screen of which they may scarcely be aware.
For those of us who are interested in strategic rhetoric, pentadic analysis reveals inventional choices and the constraints placed upon those who would lead us to view particular actions in particular ways. As I have suggested here, those choices and constraints become much more complex when more than one pentadic set is constructed. But, again, to identify those choices and constraints is the starting point for rhetorical analysis, rather than the end of it. So, for example, I show above (and in much of my research) that appellate courts strategically construct lots of acts in their judicial opinions; the rhetorical benefit, as I note above, is that constructions of such acts (including laws, constitutions, lower-court decisions, precedents, etc.) serve to constrain the appellate court's decision making, "forcing" their decision to "follow the law" rather than their own personal predilections (which unelected judges are supposed to avoid). That is, judges forge legal manacles for themselves, allowing them to claim that they are chained to the law and, as a result, that their conclusions are inevitable. Other rhetors also fashion "outside" acts to detract responsibility for their actions, such as in the war examples I note above where the (constructed) scene is said to constrain presidential action.
The examples I use in this paper of the ways in which rhetors strategically connect different acts stress their efforts to limit the ways their audiences are likely to interpret actions. That is not to say that their efforts will succeed, since language is normally flexible enough to yield different meanings. However, effective constructions suggest a preferred reading, closing the "universe of discourse" as Anderson and Prelli might say. Some preferred readings are quite closed, as I noted in the opening example of Jill driving John to the movies, where it becomes difficult to say that Jill is not the agent of the "driving" action.
On the other hand, as I pointed out in my essay "Coming to Terms with Kenneth Burke's Pentad," differences in interpretation are to be expected in light of cultural differences in audiences (and, I would add now, in personal and other differences as well). In particular, my essay distinguished those differences as reflecting general and specific dimensions of pentadic relations, noting: "General dimensions are described and amply illustrated by Burke in his Grammar of Motives: The scene 'contains' the act; means (agencies) are adapted to ends (purposes); agents are the 'authors' of their actions; and so forth." In contrast,
Specific dimensions of terministic relations are normative, established by a discourse community's shared beliefs about "what goes with what" at a given point in time, underlying expectations that one will or should find certain types of agents engaging in certain types of actions, using certain agencies, within certain scenes, for certain purposes, evincing certain attitudes.For example, in the United States of the early 19th century, women were not thought of as public speakers. As Karlyn Kohrs Campbell notes: "Quite simply, in nineteenth-century America, femininity and rhetorical action were seen as mutually exclusive. No 'true woman' could be a public persuader" (9-10). Yet, as I write this in 2016, Hillary Rodham Clinton is crisscrossing the country in her bid for President of the United States. The interpretation of which agents can do what has changed. While there is some lingering anti-woman sentiment in the electorate, the shock and novelty that abolitionist Angelina Grimké confronted on the public stage in the 1830s is gone. Culture matters to the construction of motives, whether those cultural differences derive from changing times or divergent audiences.
Beyond such specific terministic relations, words themselves can be vague, ambiguous, or freighted, leading audiences to interpret motive constructions differently than a rhetor intends. And, of course, there is the problem of the world itself threatening to impinge on a rhetor's constructions—Burke's recalcitrance. For example, 2016 Republican presidential candidate Donald Trump has repeatedly claimed that he never supported the Iraq War that began in 2003. A recording of him with talk show host Howard Stern in September 2002 shows that he did support the invasion, rather unenthusiastically. What many fact checkers have called a lie has apparently been dismissed or ignored by many of Trump's supporters who do not care about the lie or who take his own construction at face value (Caroll and Greenberg).
Constructions of motives, like other rhetorical discourses, always are shaped and understood in view of the communication situations where they are deployed. While analyses of the grammar of motives in particular statements about action can be quite rigorous—explaining general and specific dimensions of the relationships among pentadic terms and revealing rhetorical opportunities and constraints—the rhetorical work those motive constructions perform in a given case take the critic's analysis beyond the comforts of the speech transcript or the written appellate court opinion. Indeed, if we assume that visual images can be part of a text, as Blankenship and her colleagues did in studying Ronald Reagan's television image as one element of the construction of motives, the analysis can get quite messy. Going one step further, as I have suggested, to scrutinize changes in the material condition strategically wrought by far-seeing rhetors opens a whole new context-as-text to the rhetorical critic. Small wonder that rhetorical critics using the pentad have typically focused on words on a page in a relatively contained rhetorical act, such as a single speech.
Certainly there are justifications, beyond a critic's comfort, for such a focus. In my own work on U.S. Supreme Court opinions, the words of their written opinions carry the greatest rhetorical impact in most cases, telling litigants, lower courts, their own bench's future membership, and the public at large what the law is and why they think it is what they say it is. But facing up to the challenges of rhetorical analysis should remind critics—including those using what otherwise seems a straightforward and simple pentadic method—that teasing out what is interesting in rhetorical discourse is hard work. As this essay has argued, even analyzing a contained text can be complicated when multiple acts are constructed.
Of course not all rhetors engage in inter-pentadic constructions of motives. And even if they do, they do not always open up a prior pentadic set for significant grammatical construction. They may simply select a prior act as an example, counter-example, illustration, and so forth, without deploying the power of the grammar to construe it this way or that. However, when rhetors do take advantage of the connections between everything, they have the opportunity to work within more than one grammatical relationship to yield a relationship between acts that is sometimes easy and obvious but occasionally cunning and stealthy. Indeed, they may even engage in material actions that set the stage for those later constructions, either felicitously or strategically. Rhetorical critics ought to take note of such inter-pentadic constructions to better account for the rhetoric of motives. And rhetorical theorists might take this essay as a prolegomena to the study of the forms such inter-pentadic relations may take and the functions they serve.
* An earlier version of this essay was presented to the Eighth Triennial Kenneth Burke Conference in Clemson, South Carolina in May, 2011.
Works Cited
Anthony, Susan B. "Women's Right to Suffrage." Rochester and surrounding areas. 1873. Downloaded from americanrhetoric.com.
Birdsell, David S. "Ronald Reagan on Lebanon and Grenada: Flexibility and Interpretation in the Application of Kenneth Burke's Pentad." Quarterly Journal of Speech 73 (August 1987): 267-79.
Blankenship, Jane, Marlene G. Fine, and Leslie K. Davis. "The 1980 Republican Primary Debates: The Transformation of Actor to Scene." Quarterly Journal of Speech 69 (1983): 25-36.
Buchanan, Patrick J. "Address at the Republican National Convention." Houston, TX. 17 August 1992. Downloaded from americanrhetoric.com.
Burke, Kenneth A Grammar of Motives. 1945. Berkeley: U of California P, 1969.
—. A Rhetoric of Motives. 1950. Berkeley: U of California P, 1969.
Campbell, Karlyn Kohrs. Man Cannot Speak for Her, Volume I: A Critical Study of Early Feminist Rhetoric. New York: Praeger, 1989.
Carmichael, Stokely. "Black Power." Berkeley, California. October 1966. Downloaded from americanrhetoric.com.
Carroll, Lauren and Jon Greenberg. "Trump Repeats Wrong Claim that He Opposed Iraq War." Politifact.com. 7 Sept. 2016.
Clinton, William Jefferson. "National Address Announcing Air Strikes against Iraq." Washington, D.C., 16 December 1998.Downloaded from americanrhetoric.com.
"Florida Refought." National Review (2 September 2002). Downloaded from Lexis-Nexis.
Greenfield, Jeff. "Oh, Waiter! One Order of Crow!" New York: G. P. Putnam's Sons, 2001.
Kelley, Colleen E. "The 1984 Campaign Rhetoric of Representative George Hansen: A Pentadic Analysis." Western Journal of Speech Communication 51 (Spring 1987): 204-17.
Kelo v. City of New London, 162 L. Ed. 2d 439 (2005), 464-65.
Lincoln, Abraham. "Cooper Union Address." 27 February 1860. New York, NY. Downloaded from americanrhetoric.com.
Ling, David A. "A Pentadic Analysis of Senator Edward Kennedy's Address to the People of Massachusetts, July 25, 1969," Central States Speech Journal 21 (1970): 80-86.
McCabe v. Atchison, Topeka & Santa Fe R. Co., 235 U.S. 151 (1914).
Nixon, Richard M. "Checkers Speech." Nationally broadcast on television and radio. 23 September 1952. Downloaded from americanrhetoric.com.
Pogue, David. "Looking at the iPad from Two Angles." New York Times Online. 31 March 2010.
Richards, Ann. "Democratic National Convention Address." 18 July 1988. Downloaded from Gifts of Speech website at http://gos.sbc.edu/r/richards.html.
Rountree, Clarke. "Building up to War: Bush's 'Administrative Rhetoric' in the Persian Gulf Conflict," The Speech Communication Annual 10 (Spring 1996): 5-19.
—. "Coming to Terms with Kenneth Burke's Pentad." The American Communication Journal 1, no. 3 (May 1998). Reprinted in "Kenneth Burke." Twentieth-Century Literary Criticism. Vol. 286. Layman Poupard Publishers, LLC. 215-220.
—. "Instantiating 'The Law' and Its Dissents in Korematsu v. United States: A Dramatistic Analysis of Judicial Discourse." The Quarterly Journal of Speech 87 (February 2001): 1-24.
—. Judging the Supreme Court: Constructions of Motives in Bush v. Gore. East Lansing, MI: Michigan State UP, 2007.
—. "Judicial Invention in Cases Contributing to the Development of Corporate Criminal Liability: A Multi-Dimensional Dramatistic Analysis," Diss., University of Iowa, 1988, 59-60.
—. "Revisiting the Controversy over Dramatism as Literal." KB Journal 6.2 (Spring 2010).
—. "Setting the Stage for Brown v. Board of Education: The NAACP's Litigation Campaign Against the 'Separate But Equal' Doctrine," in Brown v. Board of Education at 50: A Rhetorical Perspective, Clarke Rountree, Ed. (Lanham, MD: Lexington Books, 2004): 49-90.
Sweatt v. Painter, 339 U.S. 629, 633-34 (1950).
This Week with David Brinkley, ABC, 11 November 1990.
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 19484 reads
The January 1832 Debate on Slavery in Virginia: Clashing Scenes and Terministic Screens
Jim A. Kuypers, Virginia Tech
Abstract
Following the Nat Turner rebellion, the Virginia State Legislature held a debate in early 1832 over the abolition of slavery in the state. Two sides, pro-abolitionists and traditionalists, sparred over a two-week period. Using dramatistic analysis, I undertake a case study of the debate, looking specifically for the terministic screens used by each side to ascertain their worldviews that ultimately led to a narrow defeat of the pro-abolitionists.
FOR TWO WEEKS, RICHMOND WAS AWASH WITH CITIZENS OF ALL CLASSES AND SLAVE-HOLDING STATUS.1 They came to witness a spectacle new to the American South; in January 1832, members of the State Legislature formally debated the abolition of slavery in Virginia. Newspapers described the momentous event, claiming, "we have never heard any debate so eloquent, so sustained, and in which so great a number of speakers had appeared and commanded the attention of so numerous and intelligent an audience. . . . Day after day, multitudes thronged to the capitol, and have been compensated by eloquence which would have illustrated Rome or Athens" (Dew 8). Governor John Floyd wrote in his diary that, "Nothing now is talked of or creates any interest but the debate on the abolition of slavery" (Ambler 172). The openness and candor of the delegates, coupled with the intense public and press scrutiny, produced an attention the likes of which Virginia never again lavished on the charged subject.
The deliberations represent only a footnote in history, overshadowed by the growing abolitionist movements in the North and the Nullification Crisis in the South. It is, however, a defining moment in the history of Southern oratory. Political oratory on the slavery issue, particularly the urgent calls for gradual emancipation, presaged many of the arguments and debates that constituted the "Rhetoric of Desperation" characterizing the South up until the War Between the States (Eubanks 19-72). The catalyst for this event, however, remains more than a historical note.
It occurred in late 1831, when Virginia witnessed the bloodiest slave insurrection in American history. Nat Turner, a slave and self-proclaimed prophet, met with six other slaves on August 22 ("The Confessions of Nat Turner"). That night he and his followers tore through Jerusalem, Va., leaving fifty-seven whites—mostly women and children—shot, axed, and bludgeoned to death (Pleasants 64). Rumor of the uprising spread quickly, fueled by grisly reports such as that published in Richmond's Constitutional Whig on August 22, 1831: "It was hardly in the power of rumor itself, to exaggerate the atrocities which have been perpetrated by the insurgents: whole families, father, mother, daughters, sons, sucking babes and school children, butchered, thrown into heaps, and left to be devoured by hogs and dogs, or to putrify on the spot. At Mr. Levi Waller's, his wife and ten children, were murdered and piled in one bleeding heap on the floor . . ." (Pleasants 64).
Fear of similar revolts from slaves viscerally gripped the outlying slave states Maryland, New Jersey, Delaware, and Kentucky through to the Deep South. Virginians dreaded a second rebellion, and no attempt by politicians and newspapers could soothe the public's apprehension at the thought of approximately 470,000 slaves (almost 40% of the state's total population) in open revolt ("U.S Census Office" tables 10-13).2 Joseph Robert wrote that until Nat Turner's capture on October 31, the whites living in heavily black populated sections of Virginia "hung dangerously near the panic stage," ready to spring to action at the slightest provocation (Robert 7). In the following months, other slave states took action to curb growing slave populations, attempting to avert rebellions. Georgia and Louisiana passed resolutions forbidding the importation of slaves from other states, and other regions considered similar measures (Robert 13). Virginia was a slave exporting state, and with a rapidly shrinking export market, Virginians realized that the black population would continue to grow faster than the white.
On December 5, 1831, Governor Floyd declared his commitment to ending slavery in Virginia ("The Diary of John Floyd" qtd. in Whitfield 63). The House of Delegates responded promptly, creating a committee of thirteen members to discuss the "insurrectionary movements of the slaves, and the removal of the free persons of color" (qtd. in Robert 15-16). After laborious proceedings, committee chairman William Brodnax requested that eight additional men join his ranks; thus, the final composition of the committee was sixteen easterners and five westerners (eastern Virginia had more representatives because it was more populous and heavily dependent upon slave labor). As discussion continued, the delegates coalesced into two main factions, labeled here as traditionalists—those who believed that slavery should remain in place—and the activists—who urged change, generally in the form of gradual emancipation. On January 10, 1832, traditionalist William Goode inquired after the progress of the committee. Brodnax replied that "any apparent tardiness…consisted of two main problems: the removal of the free Negroes and gradual emancipation" (Robert 18). On January 11, Goode, feeling the interests of his slave-holding constituents threatened, designed a resolution that he believed could keep the issue from reaching the floor (Robert 19). Thomas Jefferson Randolph moved immediately to amend the resolution, which, contrary to Goode's intention, opened the floor to debate. For the next two weeks, the delegates engaged in a historic sparring match over the merits and morality of slavery, its open discussion, and abolition.
Rhetorical Insights
Historians have been long aware of the 1832 slavery debate, and traditionally held that the results of the debate confirmed Virginia's acceptance and defense of the "Deep South's pro-slavery philosophy. . . . Supposedly, only the westernmost portions of the state seriously proposed emancipation in some form. The eastern areas with ease defeated the proposals and henceforth closed all further discussion of the issue" (Campbell 322). This traditional view has not gone unchallenged, with some, notably Alison Goodyear Freehling, writing that the debate was actually one act in a long struggle between conservative planter class aristocrats and democratic reformers who wished for more equitable participation in state and local affairs. Freehling stressed that the debate was "part of an ongoing contest between a white community irrepressibly divided by slavery. The struggle for political power . . . centered on slavery. Again and again, as democratic reformers challenged aristocratic conservatives for control of Virginia's government . . . a fundamental question recurred: Is slavery compatible with majority rule? Or must Virginia, to safeguard slavery, forever deny white men equal political rights?" (Freehling xii).3 Although these works focus on the historical and sociopolitical contexts, they do not engage in close rhetorical reading of the texts of the orations (Root; Aptheker; Curtis). A rhetorical analysis complicates some historical claims, notably one made by Freehling that the debate was but an additional act in a continuing struggle between democratic reformers and their aristocratic enemies. Viewed rhetorically, however, no such struggle ensued during the debate; instead, we find that many slave owners participated in substance with the activists and voted for emancipation. Viewed rhetorically, we also discover that "acceptance and defense of the 'Deep South's pro-slavery philosophy . . .'" was not as widespread or homogenous as some historians believed. The activists took great pains to identify with slave owners, and attempted to create a new vision of shared substance; traditionalists actively participated in the creation of this vision. Both sides expressed nuanced understanding of the issue, and acknowledged slavery's evil and impractical nature.
Through the analysis that follows, I reveal the historical moment's predominant attitudes and beliefs, as rhetorically expressed through the delegates' public discourse during the slavery debate. The aftermath of the Turner rebellion left Virginia in a complex and fragile state, one calling for bold yet delicate responses to the sociopolitical, material, and rhetorical dynamics. However, the way in which the speakers in this situation, the traditionalists and the activists, created their responses shows a very different understanding of the nature of the crisis, one that, when viewed rhetorically, transcends historical accounts of the debates.
A fruitful way of exploring the different understandings expressed during the debate is through the analysis of the terministic screens used by the delegates. Explaining terministic screens, Kenneth Burke wrote, "even if any given terminology is a reflection of reality, by its very nature as a terminology, it must be a selection of reality; and to this extent it must function also as a deflection of reality" (Language as Symbolic Action 45). Certainly, a speaker's choice of words and phrases orients listeners' attention to some aspects of reality over others. Importantly, "whatever terms we use … constitute a … kind of screen…." This screen "directs [our] attention to one field rather than another." Within that field there can be different screens, each "directing attention in different ways." According to Burke, "there are two kinds of terms: terms that put things together, and terms that take things apart" (Language as Symbolic Action 49). In short, continuity and discontinuity; composition and division; for Burke, all "terminologies must implicitly or explicitly embody choices between the principle of continuity and the principle of discontinuity" (Language as Symbolic Action 50).
Looking at the debate, we see how terms open up possibilities for unity, for consubstantial co-existence even while representing different political views on emancipation; or, alternatively, we see how terms diminish the strength of a consubstantial moment by stressing division. According to Lawrence Prelli and Terri S. Winters, the "notion of terministic screens enables us to scrutinize how efforts to come to terms with problematic situations often involve similarities and differences about what meanings to reveal and conceal, disclose and foreclose. At stake in efforts to 'screen' meanings terminologically is the adequacy of underlying perspectives in depicting a situation's reality" (Prelli and Winters 226). Along these lines, Burke stressed that "much that we take as observations about 'reality' may be but the spinning out of possibilities implicit in our particular choice of terms" (Language as Symbolic Action 46). Expanding on this notion, Paul Stob wrote that terministic screens "speak to the point at which language and experience move together. They emphasize the way that terms push us into various channels and fields, which continually shape and reshape our vision and expression" (146). Terministic screens allows us to infer the various means whereby identification occurs, so we can see how they open up or close down possibilities for consubstantiality.
Burke ascribed a strong influence to terminological screens; not so much in the sense of once uttered that they impose or compel a particular way of viewing the world, but rather they are indicative of the internal thinking of the communicator. These screens potentially have an influence upon those hearing the discourse: the nature "of our terms affects the nature of our observations, in the sense that the terms direct the attention to one field rather than to another.
Also, "many of the 'observations' are but implications of the particular terminology in terms of which the observations are made" (Language as Symbolic Action 46). Thus, these words and phrases can deflect, reflect, and select attention toward or away from a particular element of the Burkean pentad (Bello 243–52). Just as descriptions of acts, for instance, when viewed as representative anecdotes for a situation, are terministic screens, so too can we view descriptions of other elements of the pentad (Burke, A Grammar of Motives 199). Thus, discovering terministic screens allows us to track pentadic elements—act, scene, agent, agency, purpose—and better understand the larger, and sometimes background understanding of a situation expressed by the communicator. By examining the key terms and phrases used, we can answer very real questions concerning the nature of the observations "implicit in the terminology" chosen (Burke, Language as Symbolic Action 47). We can discover how the terminologies direct attention to affect a particular quality of observation. Moreover, by determining the nature and inner workings of the terministic screens operating, we can shed insight into the Motives, or underlying worldviews, operating to shape the delegates' understanding of the situation.
In our present case, there is a strong underlying current of scenic elements throughout the debate. Scene is essentially a container of sorts for all the action in a situation; it is both context and physical location, encompassing both time and events. With a focus on scene, we have a link to the philosophy of materialism. In describing materialism, Burke cited Friedrich Paulsen, who wrote that the "reduction of psychical processes to physical is the special thesis of materialism" (Baldwin 45). Of note, texts that emphasize scene, thus having a materialistic influence, "emphasize the power of the surrounding environment or the coercive power of circumstance . . ." (McGeough and King 153). Thus, by examining the discourse, we can assess the degree to which scene, which exists outside of an agent or an agent's act, influences the actions and thoughts of that agent. Ryan Erik McGeough and Andrew King stressed the potentially deterministic nature of such discourse:
Texts that emphasize scene downplay free choice and emphasize situational determinism. They tend to emphasize the power of circumstances over individual choice. Clarence Darrow excused the behavior of many criminals by arguing that they were victims of bad heredity and merciless environment. Supporters of social welfare programs point to bad schools and failing local economies as reasons that such programs are needed. Speakers who advise accommodating to circumstances emphasize the deterministic power of scene. (156)
As will be shown later, scene is an important element in the slave debates, yet even with such a deterministic influence, the delegates were able to work against it to stress their own moral action and agency.
I demonstrate in the pages that follow how the debaters' construction of past, present, and future scenes framed their perspectives and accounts for the differences in their deployment of terministic screens. Marguerite Helmers suggested that traditional notions of Burkean scene are temporally bound (77-94); in so far as this is true, the present case study extends our notion of scene since it highlights shifting constructions and interanimations of past, present, and future scenes. As will be shared, the terministic construction of scene is central to understanding the debate's outcome, and allows us to better understand the terministic strategies used within the four distinct themes addressed by the delegates, ultimately contributing to an understanding of scene that is supportive of competing views and, ultimately, policies. Moreover, the examination of the debate shows how even in the face of an overwhelmingly coercive power of scene, willful agent-centered moral action is attainable.
The Virginia debate offers a unique opportunity to view the clashing of terministic screens on a stunningly important topic. By examining the screens used, we can see just how close the sides came to a truly consubstantial moment; additionally, identifying these contending screens allow us to see how the political actors viewed the situation, and imbued it with meaning. Such an examination of the debate can reveal the speakers' thoughts and assessments of the political climate, latent feelings, attitudes toward slavery, and a multitude of related issues. Because the activists had the larger rhetorical burden in this debate, I focused primarily on them. I began this study by examining each speech for major themes, and then determined which themes were conveyed terministically throughout the debate.4 There are four themes, each with contrasting screens: discussion of slavery, the economy, public safety/property, and morality.
The Debate
The Discussion about a Slavery Debate
For traditionalist members of the Legislature, the debate itself seemed unwise, a foolish endeavor they needed to curtail as quickly as possible. Ironically, it was traditionalist William Goode's resolution to bar the discussion of any plans for manumission that inadvertently allowed members of the Legislature to spar. The activists' first order of business, then, addressed this issue: should the Legislature even discuss slavery? Some of the activists dwelled on this subject for large portions of their orations, making it a focal point in the debate, and an issue with which they easily attacked traditionalists. James McDowell offers a telling example in his forceful introduction:
And, sir, I would not break [the silence] now; I would not open the lips which discretion should seal, were it not that the question which we are discussing, and the discussion itself, have brought a crisis on the country; have brought up a measure for decision here, of such eventful influence over the social structure and condition of the State, as to demand . . . that, guided only by his judgment and his conscious, he should stand forth, firmly and deliberately, and take his position upon it (McDowell 3).McDowell claimed that the debate had "long been repressed by unmanly apprehensions or smothered as the dream of impracticable benevolence" (4). Like many others, he argued that every representative—by the nature of his position—had a right and obligation to fully address an issue of such great concern to the populace. The activists appealed to a common sense of duty, patriotism, and manliness, all virtues lauded in antebellum Southern rhetoric.5 Robert Powell cried: "Sir, a crisis is at hand; this great question is obliged to be met; it can no longer be evaded; and it becomes to us, as men, and as patriots, to meet it with firmness and decision, yet with caution and circumspection" (1). William Summers called the debate a "duty to ourselves"; William Roane claimed it was the "bar of patriotism"; Philip Bolling demanded "open, bold and manly" discussion (Summers; Roane; Bolling 3). Further, Bolling claimed that, "No man, who is firmly convinced that he is sustained by reason and justice, hesitates to confront his adversary," because that was "a tacit admission that reason and justice are against him" (3). Thomas Jefferson Randolph, the grandson of Thomas Jefferson, chided the representatives, claiming they had the "sagacity of the Ostrich who, if it hides its eye behind a pebble, imagines its huge body concealed from its enemies" (2). Stressing norms of virility, James Chandler acknowledged the attending females, noting the "mirth and happiness in their eye." He then goaded the men, proclaiming: "And shall man, fearless man, whose boast and pride it is to be regardless of danger, shrink from the discussion of that, which woman, lovely woman, with all her tender sensibilities and timid apprehensions, smiles at?" (Chandler 4).
Appeals to manly virtues did serve as motivational leverage, but did not squelch the opposition. The traditionalists wished to avoid discussion because they felt it would lead to widespread malcontent, and possibly incite additional slave revolts. William O. Goode described this position: The debate "is creating great pain and anxiety among a large portion of the citizens of the State, and it will raise expectations in the minds of the colored population—doomed to a disappointment which could not fail to endanger feelings highly injurious and dangerous to all parties" (1).
Charles Faulkner, a preeminent orator in the Legislature, cleverly reversed this sentiment: "There is not a county—not a town—not a newspaper—not a fireside in the state where the subject is not fully and fearlessly canvassed . . . shall we alone be found to shrink from this inquiry?" (6). Many of the state newspapers had written as much; now that the issue was in the open, they expected debate. For Faulkner and others, silence on the issue would amount to blithe neglect of their duties to their constituents, to democracy, and to Virginia. Samuel Moore admitted the debate was a "duty I owe to my constituents and to myself," so he could ensure the "future prosperity of [his] country" (1-2). These men believed their constituents deserved faithful representatives to speak for them, especially since so many Virginians considered this a crisis. By calling for direct public involvement, the representatives drew upon the ideals of democracy. Henry Berry gladly conceded, "[L]et the decision of the people be what it may, I shall cheerfully submit. I bow with submission to the will of the majority, in all matters of state" (8).
The debate was even more complex for politicians from western Virginia. The West had far fewer slaves, and most citizens wanted to maintain this balance. Western representatives, outnumbered approximately 3-to-1, had a twofold task. They had to convince the House to debate and explain how they, as Westerners—ostensibly with little vested interest—could proclaim their views on slavery. Once again, ideals of democracy and duty came to the fore; speakers also described the state as one entity, a tactic to lessen perceived differences. Faulkner defended his position by connecting the tenets of democracy and the notion that slavery directly impacted western Virginia: "I am disposed to accord to the east, exclusive legislation upon this and every other question, where the consequences of that legislation can alone affect themselves, so, in the same spirit of liberality and justice, do I claim to be heard upon any and every subject, where the effect of your legislation most fundamentally and vitally concerns my own people" (7). According to Faulkner slavery had become "a measure of vital policy with the west" for "self defense" (8). Since many slave markets had closed, and others were threatening to do so, these politicians feared that the expanding slave population would move over the mountains and into their domain. The West was now "in the same situation that the East was 100 years earlier—slaves are being imported, but [the West] wish[ed] they weren't" (Faulkner 7).
The idea of unity and community rallied the Westerners to call for the entire state to remain, in Summers's words, part of the "same political family." He further asserted that the Westerners had "come at [the Easterners'] request, not to lead and conduct the struggle, but to labor side by side, with them, to contribute whatever we may, to the success of the good cause in which we find them embarked, and which we feel to be the cause of all. I hope, Sir, that the people of the West, are yet permitted to entertain a kindly interest in the common safety, prosperity, and happiness of this Old Dominion, of which they form an integral part" (1-2).
Summary
For activists, the situation was "a crisis" of "eventful influence," one with a force such as to "demand imperatively" action; it "obliged" the assembled men to embrace their "duty" to "future prosperity." This action of discussion would enact democratic ideals: "the people," "the majority," and "public will." The public would see fear of such discussion as a "disease," "an evil." In such a scene, men must act with "judgment," and be "conscious" of allowing "unmanly" apprehensions to prevent them from discussion. They must discuss the difficult issue "as men," with a "duty" to themselves "as patriots," and with "firmness" in their decision. True men act in an "open, bold, and manly" manner, with "reason" and "justice." Certainly, if women could smile viewing the debates, men could discuss the issue with "caution and circumspection." Certainly outside the legislature the issue was being "fully and fearlessly" discussed; thus, the debate was their duty to themselves as men, to their constituents as elected officials, and finally to their state as proponents of democracy.
Ignoring these concerns could result in abhorrent consequences, even the division of the state, a prospect none found appealing. To continue the debate, the activists realized they first had to highlight their right to speak on the subject, and convince the House that the time was ripe to act.To this end, Western Virginians, although not slave owners to any large degree, were "one of the community," an "integral part," could act "disinterested," and "labor" with Easterners to contribute to the "common safety, prosperity, and happiness" of all Virginians.
Should discussion continue, traditionalists projected a future that would cause pain, anxiety, and "raise expectations." Failure to meet such expectations would lead to "feelings highly injurious" to others, "dangerous" and potentially leading to greater damage than that spawned by the rebellion. Certainly, those advocating discussion presented powerful arguments steeped in democratic tradition. In answer to such concerns, the traditionalists could only muster the specter of hurt feelings and disappointment, and a vague idea of further rebellion. Of note is that such sentiment simply begs the question of a failed emancipation. For the activists, we see a strong dominance of the present scene pressuring true men to act now for the purpose of a better future scene. For traditionalists, we see the present scene as one of relative peace, and concerns of the act of discussion leading to a future scene of chaos.
The Economy
The amended resolution proposed by Randolph had at its heart a plan conceived to alter slavery without negatively impacting Virginia's economy: "the children of all female slaves, who may be born in this state, on or after the 4th day of July 1840, shall become the property of the commonwealth, the males at the age of twenty-one years, and females at the age of eighteen, if detained by their owners within the limits of Virginia, until they shall respectively arrive at the ages aforesaid, to be hired out until the net sum arising therefrom, shall be sufficient to defray the expense of their removal, beyond the limits of the United States, and that said committee have leave to report by bill or otherwise" (Berry 8). This plan of gradual emancipation, which was not unlike many Northern states' gradual emancipation plans, sought to minimize the economic impact upon Virginia's citizens, which would have been colossal.6 An individual slave in the 1830s was worth approximately $80,000 in 2015 dollars, and the overall economic value of slaves in the entire South was over 7.4 trillion in 2015 dollars, with Virginia claiming about 28%, or almost 2.1 trillion (Williamson and Cain; Historical Census Browser).
Delegates from both sides were concerned about Virginia's economic progress. According to the 1830 Federal census, Virginia had slipped from the most populous state in 1810 to the third most populated, and could soon lose clout in the national political arena (Robert 11). Even worse, some delegates saw Virginia slipping into an economic depression, and they sought to highlight this context within the debate, ascribing the economic woes to slavery. Philip Bolling lamented of the slaveholding areas of the state: "it seems as if some judgment from heaven had passed over it and seared it; fields once cultivated, are now waste and desolate—the eye is no longer cheered by the rich verdure that decked it in other days. No, sir, but fatigued by an interminable wilderness of worn-out, gullied, piney old fields" (5).
Activists saw Randolph's adaptation of Thomas Jefferson's emancipation scheme as the best remedy. Slavery, they said, was a system that "converts the energy of a community into indolence—its power into imbecility—its efficiency into weakness," that "puts an effectual extinguisher upon all the humble aspirations of their [white laborers'] ambition," and that creates "masters [who] are prodigal, [and] slaves [who] are wasteful" (Faulkner 17; Bolling 4; Berry 8). They maintained that the only way to increase Virginia's productivity was through a system based upon free white labor. Henry Berry painted a vivid portrait of this: "Every individual . . . is stimulated by a desire to become wealthy, distinguished, independent, and powerful. All the faculties of each individual are expanded, and fully developed; each acquiring all he can, and taking care of what he does acquire; hence the mass of production of all that is essential to the comfort and happiness of man, is infinitely greater in a free, than in a slave population" (Berry 8). James McDowell echoed Berry's ideal, stating that "no proposition can be more easily or conclusively established . . . than this, that the labor of a free white man, in the temperate latitude of Virginia, is more productive than that of a slave—yielding a larger aggregate for public and for private wealth" (McDowell 4). Thus, as profitable as slaves could be, labor of free whites would be as much or more so. Traditionalists framed Randolph's proposal in opposite light. Even in gradual abolition, they saw great peril. John Thompson Brown warned that, "A few bankruptcies may go unnoticed, but it is a fearful thing to drag down an entire community from affluence and ease, to abject poverty" (Brown 8; Bolling 6).
Summary
The activists frequently pointed to Virginia's economic plight. McDowell stressed that, "it is true of Virginia, not merely that she has not advanced but that in many respects she has greatly declined; and what have we got for a compensation for this decline? Nothing but the right of property in the very beings who have brought this disparity upon us" (9). With a rapidly increasing black population and an uncertain economy, Virginia must abandon slave labor for its more efficient counterpart. The plan itself was meant to incorporate the issue in a manner respecting property rights—hence the proposed time lag of decades. Moreover, the economic burden would be non-existent since slaves would labor until they reached a specified age, and then they would work to pay their passage to Africa. For the activists, the future scene with slavery compelled a change due to "duty" and the desire for "future prosperity." They contrasted this with a past scene of Virginia as a "rich verdure" and the present scene of a Virginian "wilderness" as a "judgment from heaven." Pushing a dichotomy of existential states, activists suggested that slavery turned "energy" to "indolence," "power" to "imbecility," "efficiency" to "weakness," and was the "extinguisher of ambition." Stressing free will, the activists linked "human nature" as "free" to a "more productive" state. A free society would be a "wealthy" and "powerful" society, one in which its members would be "distinguished," "independent," living in "comfort" and with "happiness." Traditionalists countered the activists' images of Virginia's economy with specific references to successful and flourishing plantations and cities. The primary focus, however, was upon a future scene where emancipation would lead to "bankruptcies," and from "affluence and ease" to "abject poverty." "Desolation" would result even from gradual emancipation.
The economic portion of the debate thus spawned dueling scenes of both present and future Virginia. The activists' screen involves a present with slavery causing the blight existing in Virginia; emancipation would lead to a prosperous future scene. The traditionalists' framing presents a present scene in which slave holders and the state are particularly well off with slaves, contrasted to a future scene where that aspect of society, and the benefits of culture and economy, would be ruined without slaves. Thus, a future without slavery would cause an even greater blight than that envisioned by the activists should their vision hold true.
The Question of Safety/Property
Any complete discussion of emancipation necessitated debating the problem of constitutional property rights versus public safety. Traditionalists constructed their argument around a defense of private property, whereas activists viewed slavery as a threat to the public safety that outweighed any individual's right to property. Although some activists—notably William Preston—argued that slaves were not property at all, most refused to debate the issue of slaves' humanity in the eyes of the law, realizing the futility at that time of such an argument. Traditionalist Willoughby Newton epitomized the entrenched commitment of his faction to their beliefs: "I [shall not] attempt to answer the arguments of gentlemen who maintain that our property is not our own—that slaves are not property. I mean no disrespect to the gentlemen who have urged these arguments; but, sir, I would as soon attempt to convince, by argument, the midnight assassin, that my life is my own—or the highway robber that my purse is my property" (Robert 98). Some delegates, in the same breath that they admitted slavery was an evil, claimed that a man's right to property should take precedence. James Bruce asserted that slavery's "glaring and palpable defects serve to show us the difficulty, or rather the impossibility, of devising any scheme of emancipation which shall be practicable, and not at the same time in direct violation of the rights of property" (2). The next day, William Daniel took this argument one step further by asserting that no matter how terrible the evils of slavery, he would not allow the Legislature to interfere with their status as possessions. "You may prove, if you can," he stated, "that slavery is immoral, unjust and unnatural; that it originated in avarice and cruelty, that it is an evil and a curse, and you still do not convince me that our slaves are not property, and as such, protected by our Constitution" (1).
In order to increase their ranks, activists had to present the argument in a manner that would accept slaves as property, while simultaneously proving it a violable right. They thus designed their responses to counter the traditionalists' argument that any effort to abolish slavery—whether immediately, or in twenty years—would undermine the sacred right to property granted by the Constitutions of both the United States and Virginia. They chose to advance their case delineating the government's role in public safety, increasing the salience of this point by referencing as often as possible slavery's intolerable danger to the public. The recently released census that warned of an increasingly large proportion of blacks in Virginia bolstered this context; men on both sides of the debate expressed concern at the extent to which the black population was growing.
Rives, a delegate not firmly aligned with either camp, estimated that with closing borders for export, "the disproportion [of blacks to whites] would become as ten or twenty to one" (2). Activist John Chandler assumed that by 1880, Virginia would have over one million slaves, "an amount too great, too appalling for a statesman not to apprehend some danger from" (Chandler 9). Faulkner asked his audience to consider the effect this huge black population could have upon the whites of Virginia: "If this immense negro population were now in arms—gathering into black and formidable masses of attack—would that man be listened to, who spoke about property—who prayed you not to direct your artillery to such or such a point, for you would destroy some of his property?" (4). Such emphasis on the rapid growth of the state's black population added an extra degree of salience to the issue, and implied a timeframe after which action would be impossible and the system inextricably entrenched.
Activists asked their audience to prioritize the main purposes of government, and in arguing for personal safety, they agilely circumvented an individual's natural right to property. Henry Berry epitomized this stance when he posited: "The use and enjoyment of all property, is always controlled by a regard for the safety of the public, as the paramount law of every state" (Berry 5). James McDowell concurred that "security is the primary purpose for which men enter into government; property, beyond a sufficiency for natural wants, is only a secondary purpose" (McDowell 15). Berry later derided the traditionalists who claimed that nothing warranted the violation of property rights: "[R]aising young tigers… might be a very lucrative business; but, sir, it probably would be very dangerous to the public; and will it be pretended that the legislature could not check it?" He warned that, "it is probably that the raising [of] young slaves will be come equally dangerous" (Berry 5). Speaking in the wake of the Southampton tragedy, activists had a readily available emotional resource. Philip Bolling capitalized on this, seeking to prove conclusively that slaves are, beyond doubt, a grave danger to the public: "Fanaticism, of all the horrid passions with which man is cursed, is the most wild and ungovernable in its character, and is the peculiar child of ignorance. Ignorance is the necessary consequence of slavery; and we all know, sir, that our slaves are not only extremely ignorant, but extremely fanatical; and, therefore, always dangerous" (4). To buttress advocates' claim about slaves' threat to the public, John Chandler invoked Southampton directly: "Has slavery interfered with our means of enjoying LIFE, LIBERTY, PROPERTY, HAPPINESS, and SAFETY? Look at Southampton. The answer is written IN LETTERS OF BLOOD, upon the floors of that unhappy county" (7). Randolph felt that the uprising was just an indicator of bloodshed to come if things did not change.
In stark contrast to the doomsday rhetoric of the activists, traditionalists gave considerable effort to paint a scene populated by docile, happy, peaceful, and harmless slaves (Gholson). They accused activists of attempting to instill paranoia in the public: "these alarmists do injustice to Virginia, and the character of our people—The dangers they imagine, do not exist—the general alarm and apprehension of which they speak, do not exist" (Gholson 2). In another attempt to minimize the perceived threat to public safety, Rice Wood made the bold claim that even the Southampton massacre should hearten Virginians and convince them of their slaves' loyalty and contentment because the majority of slaves did not turn on their masters during the massacre: "They are obedient and tractable, and most of them, as recent events show, will not only put them upon their guard against meditated danger, but will shed their blood, in their defense when it comes. In the period of two hundred years, only one instance has occurred in which a black man has been so far misguided and deluded, as to attempt to assassinate the master and his family . . ." (qtd. in Robert 81). Committee Chairman William Brodnax turned the table of argument further and depicted activists' plan of gradual emancipation as a scheme that would lead to far more bloodshed than the current situation could ever yield. Citing the arbitrariness of the July 4, 1840 cut-off for emancipation, he asked, "Will this inequality of condition, do you suppose, excite no restlessness and dissatisfaction among them? Will they not feel that the same principle which gives freedom to one entitles the others to it? Will they quietly submit to such unmerited distinctions? Will this not also lead to lawless efforts and insurrections?" (Brodnax 16).
Summary
Depicting Southampton either as anomaly or tragedy, and choosing to focus on either property rights or public safety, created widely diverging pictures of the same events and institution. The activists stressed that the growing number of slaves was simply "too great" and "too appalling," thus delegates must apprehend immediate "danger." Should the numbers continue to rise, it would lead to "formidable masses of attack." Because of this immanent danger, the "safety" of the "public" trumped property rights. Safety was a "paramount law," with public "security" the primary purpose for the state. Slaves are a "danger" since "ignorance" is a consequence of slavery; slaves are "fanatical," and ignorance and fanaticism breed danger. Because of Southhampton, slavery has interfered with Constitutional guarantees to "life," "liberty," "property" (beyond slaves themselves), "happiness," and safety. There would be bloodshed to come. Traditionalists claimed that "alarm" and "apprehension" simply did not exist. Slaves, as a people, were "happy," "contented," "peaceful," and "harmless." Moreover, they had a 200 year history of being "faithful," obedient" and "tractable," demonstrating support to the assertion that Southhampton was an aberration. The state did not have the right to "confiscate" the property of citizens. It would be "impossible" to take property without "violation" of Constitutional "rights of property." Importantly, the proposed emancipation would introduce "inequalities" of condition in the slave population, and this would led to "restlessness" and "dissatisfaction." Non-emancipated slaves would become "lawless" and provoke "insurrection."
Although there is certainly a clash between the themes of property and safety, the real clash, as in the themes of the discussion of slavery and economic impact, lies between present and future visions of order and disorder. The traditionalists have one version of the character of the slave population. They point to a dearth of insurrections and violence, which acts as an anchor for a future scene. Activists use the tragedy of Southhampton as an anchor for a future scene as well, although one in direct contrast to that depicted by the traditionalists; additionally, they point to a different character of the slave population, one closer to a common human failing, that of ignorance within humans that leads to fanaticism and danger. So there exists a clash of the nature and character of slaves within the present scene following Southhampton. Activists see an ignorant, fanatical, and growing population turning violent, with no changes leading to insurrection. Traditionalists see a generally happy, protective slave nature continuing into a future based on a 200 year past lacking violence.7 For them, change will lead to other insurrections.
Morality and the Sins of the Father
Both activists and traditionalists widely acknowledged that the system as a whole—not necessarily the individuals involved—was evil. For the activists, morality represented a complex rhetorical posture. To convince traditionalists to abolish slavery, activists had to increase the salience of the evils of slavery to spur them to action; however, attacking the morality of slavery could be seen as a personal attack on the slaveholders themselves, something that would only engender bad feelings and resistance to change. To account for this, they referred to slavery and its related issues as evil, characterizing the system in the worst light possible: "the legacy of weakness, and of sorrow," "withering under the leprosy," "the evil of slavery," "the ruin of our best hopes," "deadening oppression," "disease," "a blighting, withering curse," "injustice and oppression," "advancing enemy," "the slothful and degraded African," "cancer," "an increasing curse," and "a hideous deformity" (McDowell 23; Powell; Garland; Bolling; White 7; Campbell qtd. in Robert 104; Faulkner 9; Berry 2; Chandler 7).
The traditionalists couched slavery in much the same terms: "appalling evils of slavery," "it is a mildew," "slavery in Virginia is a . . . transcendent evil," "abhorrence for slavery," and "evils of the system." They admitted the principle of slavery was wrong: "I should be the very last to agree with [the abstract principle of slavery]," the people must "mitigate its evils," and "I acknowledge [it] to be an evil" (Dabney; Brodnax; Gallagher qtd. in Robert 112; Bruce; Brown; Gholson; Wood qtd. in Robert 81). Nevertheless, the traditionalists went on to say eliminating slavery would not be worth the exchange. John B. Shell, for example, said: "I have attempted to show to this House, that whatever the evils of slavery may be—whatever the dangers which accompany its existence—whatever the calamities it is likely to bring upon our country, our pecuniary condition and prospects are such as to render action now totally impracticable" (2). That is, eliminating slavery would cause more material, economic harm than good. The emancipatory goals of the activists demanded that they somehow express the debate in terms of morality, and increase the salience of this issue. The other themes—the merits of the debate, economic arguments, and property rights—represented lesser issues. Morality, however, was the screen through which they desired the entire issue of slavery viewed. For if the immorality was considered pressing and destructive, then the other issues would be more easily resolved.
To avoid directly attacking the traditionalists, the activists delineated a nuanced view of morality. They claimed slavery was responsible for immoral acts, but it was through no fault of the slave owners. Samuel Moore explained that the "species of labor in which slaves are usually employed . . . is very generally regarded as a mark of servitude, and consequently as degrading and disreputable" (1). It was simply by affiliation that slavery's vices were transmitted to their owners and, according to Bolling, "every system of slavery is based on injustice and oppression" (9). Thus, it was not the owner's fault, but the institution's, since one could not escape slavery's inherent shortcomings. Faulkner claimed that slavery "converts the energy of a community into indolence—its power into imbecility—its efficiency into weakness" (17). Bolling elaborated on Falkner's idea: "Slavery always had, and always must produce a great amount of idleness and vice" because freemen will not want to reduce themselves to the level of a slave (15). For these speakers, idleness was a terrible side effect, one rooted in biblical prose known to all. Bolling deplored the system as well, pointing to the sheer number of slaves as a compounding factor for the immorality: "If one half of those inhabitants are slaves, one half of the mind, and moral susceptibilities of that society, is lost to all useful purposes . . . which I esteem a greater loss to the state than any amount of money could be" (12).
Perhaps the most emphasized aspect of morality was a theme addressing the sins of the fathers. Although traditionalists initially raised this issue, activists co-opted it quickly. Early in the debate, some traditionalists claimed it was unfair to blame current slave-owners for a system enacted by an earlier generation: "it is as unkind as it is unjust to reproach a generation for misfortunes transmitted to her by generations before her, and from which no exertions of hers could relieve her. . . . We are not responsible for the existence of slavery among us" (Gholson 2). The activists in no way shrank from this assertion; they instead embraced it, and simultaneously deflected criticism from themselves. First, activists redefined the issue by accepting Gholson's posture that the present generation was not responsible for slavery. Bolling referred to the institution as "a curse entailed upon us by our ancestors," and McDowell boldly declared "slavery has come down to us from our fathers" (Bolling 4; McDowell 10). In this sense, the activists avoided blaming the current slave-owners, and removed one of the traditionalists' potential attacks. The activists then used this situation to their advantage, defining the sins of the fathers in a manner that could induce guilt if an emancipation policy remained elusive. McDowell exemplified this idea, making posterity the motivational framework. The person "who could have blotted out this curse from his country . . . would have received the homage of an eternal gratitude, who casting away every suggestion of petty interest, had broken the yoke which, in evil hour, had been imposed and had translated . . . to another continent . . ." (10).
If the arguments of posterity were insufficient, the activists touched on the personal, focusing on the legacy delegates would leave their children. Creating guilt, they claimed that their children would revile them for inaction: "[T]he question now is, shall we, in turn, hand it over to our children? Hand it over to them in every attribute of evil? Shall we perpetuate the calamity we deplore and become to posterity the objects, not of kindness but of cursing? Possessed of slaves as a private property by the act of our ancestors, shall we transmit it as such throughout an indefinite future? This is the question" (McDowell 10). Moore worried about the Legislature's "lasting influence," and Randolph implored, "Are we then prepared to barter the liberty of our children for slaves for them?" (Moore 1; Randolph 9). The sense of posterity was palpable; speakers despaired that they could be the ones who could have averted calamity, and they would be enshrined in this position for eternity. Chandler feared for Virginia's very existence, exclaiming that the delegates could inevitably destroy the State: "Will not the life, liberty, prosperity, happiness and safety, of those who may come after us, be endangered in a still greater degree by [slavery]? How, then, can we reconcile it to ourselves, to fasten this upon them? Do we not endanger our very national existence by entailing slavery upon posterity?" (7).
Summary
For the activists, slavery represented a "weakness" that perpetuated a "sorrow" and an "injustice." Institutionally it had a "withering" effect upon the collective morality; it was a "leprosy," an "evil" that ruined the state's best hope for a resplendent future. Slavery was a "deadening oppression," a "disease," "curse," and "cancer." Left unchecked, it would continue to be an "advancing enemy" that "degraded" all Virginians with "hideous deformity." Activists saw the institution of slavery as a taint that could only infect further their genteel society: it was "disreputable," based on "injustice" and "oppression." Since laborers were not free, it also bred "idleness" and "vice"; yet in a culture steeped in the Puritan work ethic, this would also infect the entire planting class and beyond.
Activists clearly saw the institution as an ancestral curse, yet one to be broken in the name of posterity. The delegates could "blot out" the curse to receive "eternal gratitude" if only they would walk away from "petty interests" and "break the yoke" of actual slavery and its influence on the citizens of the state. The demeaning present scene must not continue; their children must not inherit it. Should they give to their children a "calamity" imbued with the "attribute of evil"? Should the delegates give kindness or a curse? This focus on the negative scene actually opens the door to a prevailing call for action, with "duty" coming first in order to avert the progress of evil. For speakers living in a time when family, history, and community weighed heavily on the psyche, the charge to posterity commanded attention.
Activists, though, intrinsically linked morality to economics and a particular scene. The increase in slaves, and the supposed desolation of the land, represented the catalyst demanding that the Legislature act at this exact moment. Postponing action would only make it more difficult to remove the disease growing daily stronger. This, of course, related to the original crisis and the need to engage in debate now, before it was too late. Having argued that slavery had a deleterious effect on master as well as slave, the activists now depicted emancipation as an act of "liberty" for all of their children. The rights of life, liberty, prosperity, property, and safety would be "endangered" by inaction. Traditionalists, too, framed slavery as an appalling evil, a "mildew," that was "transcendent," "abhorrent," and a systemic evil. The moral high road, emancipation, would rectify these wrongs, but would eventuate in the ruin of the state, which itself had moral implications. They minimized transcendental moral concerns through the foil of a greater practical immorality: of property loss resulting in economic collapse—a worse fate for the children of the state. This line of reasoning raised maintaining the status quo by the traditionalists to an actual moral act. Unlike the previous three themes, with their clashing present scenes, we see the clash between the traditionalists increasingly mired in the scene and inaction, and the activists in a similar scene, stressing the moral nature of human free will and the act.
Discussion
At the beginning of 1832, Virginia and the South stood at a crossroads, with the Nullification crisis ushering in a strife-filled era of rancor characterizing all politics leading up to the War Between the States. The debate in Virginia represented a final moment when slavery was discussed openly and civilly, with all sides listening and issuing sound retorts. Although civil, the political maelstrom elicited fiery orations from both sides; the burden of proof, however, was squarely on the shoulders of the activists, for they attempted to alter the very fabric of Virginia, and proposed what most considered a radical view of government interference and eminent domain. In this respect, activists had to convince the legislature to embrace a plan never attempted, never even seriously considered. The activists showed both a remarkable awareness of their audience and an adroit ability to manipulate the stances of traditionalists into tools to further the cause of gradual emancipation. That they failed should not be a cause for reproach; instead, we might ask how it was they came so close to success. In the end, fifty-eight members voted to enact Randolph's plan for gradual emancipation, and seventy-three voted against it. Out of one-hundred-and-thirty-one votes cast, the outcome would have been different had only eight members changed sides. A compromise did pass; it decried the evils of slavery, supported removal of free blacks, and left open the possibility of future legislation. The activists valiantly attempted to overthrow an institution they felt was antithetical to a glorious future. Ultimately, they failed by a slim margin. Historians view this debate as a power struggle between the rich planter class and democratic reformers, the east versus the west. Viewed rhetorically, this distinction proves problematic; instead, the contest was not so much between planter class and reformers as it was between competing visions of Virginia's present, and what moral action would present the best Virginia future. Although not successful in terms of emancipation, the debate did present a strong consubstantial moment that almost transcended differences in class and economic means.
There were, of course, four interanimated themes whose terministic screens acted to construct their respective themes in a particular manner. In terms of the discussion of slavery, activists saw the scene (present and future) as awesome in power, yet this was less powerful than the free will of the men in the legislature who could act now to change the situation. Traditionalists saw the scene (future) as awesome in power as well, yet such was its power that their acquiescence to activist action would be to abrogate their free will. In a sense, then, their non-act in the face of activists' call for change was actually an act of free will. In terms of the economy, activists did portray the present scene strongly, yet it was this description of a future scene of tragedy that compelled delegates to act for a different future scene of prosperity. Traditionalists painted a scene of relative harmony now, contrasted with a scene of tragedy if the plans of the activists were developed. Taken together, it was the scene (present/future) as awesome in power and avoiding action as an act. In terms of property/safety, the activists saw a present scene of disorder, one becoming intolerable with no action—a future disordered scene. Traditionalists stressed a present scene of order, in danger of the proposed action. Emancipation would lead to a disordered future scene, one with bankruptcy and violation of basic constitutional guarantees. In terms of morality, activists and traditionalists shared a mutual negative present scene (presenting the best opportunity for consubstantiality). Activists stressed a moral act of emancipation steeped in an agency of free will and posterity; traditionalists stressed the present scene of immorality trumped by a worse scene of economic and social ruin should emancipation pass.
Taken together, these terministic screens combined in a nexus of dramatistical importance, and in this place very forcefully point toward clashing worldviews making consubstantial moments difficult. Activists lived in a world were the present scene was one of disorder, and left unchanged would only grow worse. They urged acting now for a positive future scene of order. Traditionalists lived in a world where the present scene was one of order, and any change would be so catastrophic as to lead to devastation and a future scene of disorder. They urged an active act of inaction. Thus we have the grating of inconsubstantial elements: although both activists and traditionalists were operating from a scene-act sense of reality, the grounding understanding of scene was simply too different to fully overcome.
The nexus of these terministic screens seem to coalesce around the issue of morality. Here we see the activists' best chance at winning converts, since traditionalists in general agreed with slavery as an evil. The activists presented this in two parts. First, the area in which traditionalists agreed was the morality tainting scene of slavery that impacted the entire South, and in particular the owners of slaves. In this sense, slavery (scene) affected the person (agent). In the second part, the activists stressed the scene of slavery in which an act of emancipation occurs; thus, the act now would determine a new future scene for Virginia. The traditionalists were strongly entrenched within an unyielding scene, and the vision presented by the activists was ultimately not enough to secure the necessary majority of those opposing emancipation. They failed to provide enough of the enabling aspect to those shaped by the evil of slavery (scene). If anything, it worked to reinforce for some the notion of an intractable scene.
In the discourse of both the activists and traditionalists exists a dominance of scenic elements that suggest a philosophical materialism underpinning the discourse. Burke offers a traditional notion of materialism: "that metaphysical theory which regards all the facts of the universe as sufficiently explained by the assumption of body or matter, conceived as extended, impenetrable, eternally existent, and susceptible of movement or change of relative position" (A Grammar of Motives 131). It is "the theory which regards all the facts of the universe as explainable in terms of matter and motion . . ." (A Grammar of Motives 131). This intimates, according to Jim A. Kuypers, "that action is reduced to motion when scene dominates. In this sense, only the material is significant; that which is observable, touchable, and measurable takes precedence over other concerns. This materialistic motive also allows pressure to be placed upon those interpellated within the scene. We are a part of that which is occurring, but we are not necessarily able to remove ourselves from it" ("From Science" 154-155). This is clearly the case with the traditionalists, who created a scenic understanding of both present and future so compelling that many delegates were simply unable to embrace the morally liberating act offered by the activist discourse. However, the focus on the scene was not of an overwhelming domination, placing crass materialism (love for property) over the moral cleansing offered by the activists. Instead, the traditionalists were, as were the activists, allowing the situation to influence their act. For traditionalists, not joining the activists was itself an act, an act whose purpose represented both acquiescence to the present generational curse of slavery, and the moral act of saving a society and culture whose future was uncertain in the face of the actions of the activists.
The materialism inherent in this domination of scene suggests human action replaced by human motion; the scene is so strong that only what we can observe is important. For Burke: "things are more or less real according as they are more or less energeia [activity] (actu, from which our 'actuality' is derived). [F]orm is the actus, the attainment, which realizes the matter" (A Grammar of Motives 227). Insofar as this is true, we can see both activists and traditionalist enacting their plans in accordance to the form suggested by their respective scenes, the sequence of the act. The scene in this case did not enervate action, because both activists and traditionalists provided for a moral aspect of response, thus embracing that morally vital side of a human agent who can act independently of the scene. In our present case, either act of the activists (emancipation) or traditionalists (status quo), viewed morally, allows for redemption and purification of Virginia society from the guilt caused by the Southhampton tragedy.
In response to the scene, both sides called for a moral agent acting now. Although not dominating the discourse, the strength of the acts described flow well from the scene, and strongly implies a philosophical realism underpinning this aspect of the discourse. This correlates well with the activists' focus on the situation as it is now, and how action is necessary to alter Virginians' shared future. Realism is the belief "in the real existence of matter as the object of perception (natural realism); also, the view that the physical world has independent reality, and is not ultimately reducible to universal mind or spirit." In this sense, a realist motivation suggests "the existence of objects in the external world independently of the way they are subjectively experienced"; thus, a division between the stark facts of a situation and the subjective or idealistic interpretation of those facts ("Realism"). By focusing on the facts, the activists were actually inviting the traditionalists to participate in a potentially consubstantial moment in shaping Virginia's future. As Bernard L. Brock, Robert L. Scott, and James W. Chesebro wrote, "the realist grammar begins with a tribal concept and treats the individual as a participant in substance" (188). In our present case, the activists initially had to overcome the sense that they were all from Western Virginia, and thus distinct from their considerably more numerous, and slave holding, Eastern brethren. The underlying stress on action presented such an opportunity. Here we can see the underlying, although competing, cycles of redemption with activists and traditionalists. Following Burke's notion of Motivation, we can trace how the activists and traditionalists established a redemptive cycle within their discourse, and also how both sides allowed for an agent-centered moral action that worked for the possibility of a redemptive transcendence of the problem. As Burke suggested, by analyzing the terministic screens used to discuss the situation, we determined how the delegates named "their structure and outstanding ingredients, and name[d] them in a way that contain[ed] an attitude toward them" (The Philosophy of Literary Form 1).8 It is within these elements that the motives underpinning the delegates' discourse reside. Ultimately, it is within these motives that we can gain insight and understanding into how the discourse worked to secure action. Put another way, we can see how the delegates allowed opportunity for consubstantial moments on the issue of emancipation.
Importantly, both the traditionalists and activists have calls for action, with both envisioning a moral agent acting now. It is in this action that the third phase of the dramatistic cycle—redemption—will occur. For the activists, if the act is for good (emancipatory; redemptive), the present and future scenes are recast and society is saved. If there is no action, then guilt and pollution remain, the scene will continue to dominate and a moral taint and threat to safety remain. For the activists, there is no need for a scapegoat or mortification, only right action, one that embraces an idealism of a new future scene. In contrast, the traditionalists also envision a moral agent acting now, through which we can also see the third phase of the cycle of redemption. For the traditionalists, if the act is good (preserving social order, culture, and society from the fallout of Southhampton; redemptive), the present and future scenes are recast and society is saved. Their action is actually deliberate inaction, thus empowered by their view of the scene instead of being sheer motion. For the traditionalists, the action of the activists would result in added guilt and pollution, the scene would become even worse with the immoral act of leaving only devastation for their children.
Through this moral struggle, a redemptive transformation is within reach: both activists and traditionalists are the agents of the act, and imbued with certain idealism; they are empowered individuals who exist in a society dominated by a guilt-ridden and polluted scene. To better understand potential consubstantial moments, we can argue that the dialectical pairs (in this case the elements of the pentad) "are not merely to be placed statically against each other, but in given poetic contexts usually represent a development from one order of motives to another" (Burke, A Rhetoric of Motives 11). With this in mind, we can better understand the qualitative progression from scenic domination to a delegate's act. In understanding the power of these envisioned acts, we must pause and look again at the debate as a whole so that we see how the terministic screens employed by the delegates acted to reflect their realities, deflect both their own and others' perceptions of reality, and select certain aspects of reality to highlight. Importantly, we also see how these screens acted to encourage certain notions of continuity and discontinuity with Virginia's past. It is in these moments that we can see where there were true possibilities for consubstantial action, and where the respective terministic screens locked-in certain interpretations of reality that would make consubstantial moments unlikely.
A clash occurred throughout the debate between the scenes embraced between the activists and the traditionalists. Both groups seemed to embrace a notion of action based on human free will that could mitigate the dangers of these scenes; unfortunately, the natures of the scenes were so different as to prevent a consubstantial moment where joint action would act for both groups in a society-wide redemptive moment. The best hope for this redemption was in the area of moral concerns, where both groups shared in the substance of an immoral present scene mired in the degrading spectacle of slavery. It is in this area perhaps, where worldviews coalesced, that both activists and traditionalists were able to jointly operate from a realist grammar. In discussing what act to take to remove the present scene, true persuasion operated and the delegates were able to ensconce their arguments in notions of human free will necessary for true moral action. The activists began the debate heavily outnumbered, and in the end, fell only eight votes shy of achieving their goals. Ultimately their idea of a moral act of free will to step out of the moral quagmire of slavery was overshadowed by a compelling vision of the moral quagmire of slavery replaced by, in the eyes of the traditionalists, a deeper moral quagmire of a future Virginia desolate and ruined by emancipation.
Acknowledgments
This project was a recipient of the South Atlantic Studies Initiative Award, College of Liberal Arts & Human Sciences, Virginia Tech; an earlier version of this paper was presented as the Top Competitive Paper of the Burke Division at the Southern States Communication Association Convention, Tampa, 2015. For their contributions to this project, the author wishes to thank Elsbeth R. Drews and Alston B. Ramsay, both students in his Southern Oratory Seminar at Dartmouth College, Ashley Gellert, his research assistant at Virginia Tech, Nneka Logan, his colleague at Virginia Tech, and the anonymous KBJ reviewers.
Notes
1. Black and Native American slaveholders were not present during this debate. At the time, fewer than 5% of Southern whites owned slaves, and of those who did, only the top 1% of this number owed more than 50 slaves. In 1830, approximately 12% of free blacks in Virginia owned slaves.
2. According to the 1830 census, Virginia's slave population was 469,755.
3. In addition to Freehling, others, as early as Thomas R. Dew, advanced that the debate was not a complete endorsement of slavery, but contained elements of eventual emancipation, and denied slavery as a perpetual good.
4. By themes I mean the subject of discussion, or that which is the subject of the thought expressed. See Kuypers, "Framing Analysis"
5. See Waldo W. Braden, The Oral Tradition in the South (Baton Rouge: Louisiana State UP, 1983); W. Stuart Towns, Oratory and Rhetoric in the Nineteenth-Century South: A Rhetoric of Defense (Westport, CT: Praeger, 1998).
6. In 1830, these Northern states still had slaves: Connecticut, Delaware, Illinois, Indiana, Maine, Maryland, Michigan (territory), New Hampshire, New Jersey, New York, Ohio, Pennsylvania, and Rhode Island.
7. We do know now that there were insurrections in the South before that period, but should resist the urge to suggest duplicitous motives on the part of delegates advancing such argument as those represented here. Without the presence of mass media, many smaller insurrections and violent actions simply never made it out of the boundaries of the county or state in which they occurred. See Aptheker for an overview of such insurrections.
8. See also pages 6, 298-304. For a detailed discussion of Burke's notion of motive see, Andrew King. "Motive." The American Communication Journal vol. 1 no. 3, 1998, http://ac-journal.org/journal/vol1/iss3/burke/king.html. See, too, J. Clarke Rountree, III. "Coming to Terms with Kenneth Burke's Pentad, The American Communication Journal vol. 1 no. 3, 1998, http://ac-journal.org/journal/vol1/iss3/burke/rountree.html.
Works Cited
Ambler, Charles H. The Life and Diary of John Floyd. Richmond Press, Inc., 1918, Richmond, VA.
Aptheker, Herbert. American Negro Slave Revolts. International Publishers, 1974, New York, NY.
Baldwin, James Mark, editor. Dictionary of Philosophy and Psychology vol. 2, iss. 1. The Macmillan Company, 1911, New York.
Bello, Richard. "A Burkeian Analysis of the 'Political Correctness' Confrontation in Higher Education." Southern Communication Journal, vol. 61, 1996, pp. 243-252.
Berry, Henry "The Speech of Henry Berry of Jefferson in the House of Delegates of Virginia, on the Abolition of Slavery." T.W. White, 1832, Richmond, VA.
Bolling, Philip. "The Speeches of Philip A. Bolling (of Buckingham) in The House of Delegates of Virginia, on the Policy of the State in Relation to Her Colored Population: Delivered On The 11th and 18th Of January, 1832." T.W. White, 1832, Richmond, VA.
Braden, Waldo W. The Oral Tradition in the South. Louisiana State UP, 1983, Baton Rouge.
Brock, Bernard L., Robert L. Scott, and James W. Chesebro, editors. Methods of Rhetorical Criticism: A Twentieth-Century Perspective, 3rd ed. Wayne State UP, 1990, Detroit.
Brodnax, William H. "The Speech of William H. Brodnax of Dinwiddie in The House of Delegates of Virginia, on the Policy of the State with Respect to Her Colored Population: Delivered On The 13th Of January, 1832." T.W. White, 1832, Richmond, VA.
Brown, John Thompson. "The Speech of John Thompson Brown in the House of Delegates of Virginia, on the Abolition of Slavery: delivered Wednesday, January 18, 1832." T. W. White, 1832, Richmond, VA.
Bruce, James. "Speech before the Virginia Legislature." Richmond Enquirer, 24 Jan. 1832.
Burke, Kenneth. A Rhetoric of Motives. George Braziller, Inc., 1955, New York.
—. A Grammar of Motives. University of California Press, 1969, Berkeley, CA.
—. Language as Symbolic Action: Essays on Life, Literature, and Method. U of California P., 1966, Berkeley, CA.
—. The Philosophy of Literary Form, 3rd ed. U of California P., 1974, Berkeley, CA.
Campbell, Edward D. C., Jr. "Review of Drift Toward Dissolution: The Virginia Slavery Debate of 1831-1832, by Alison Goodyear Freehling," Louisiana History: The Journal of the Louisiana Historical Association, vol. 24, no. 3, 1983, pp. 322-324.
Chandler, James. "Speech of John A. Chandler of Norfolk County in the House of Delegates of Virginia, on the Policy of the State with Respect to Her Slave Population." T. W. White, 1832, Richmond, VA.
Curtis, Christopher M. "Can These be the Sons of their Fathers?": The Defense of Slavery in Virginia, 1831-1832. MA thesis, Virginia Polytechnic Institute and State University, 1997.
Dabney, William James. "Speech before the Virginia Legislature." Richmond Enquirer, 30 March 1832.
Daniel, William. "Speech before the Virginia Legislature." Richmond Enquirer, 31 January 1832.
Dew, Thomas R. Review of the Debate in the Virginia Legislature of 1831 and 1832. T.W. White, 1832, Richmond, VA.
Eubanks, Ralph T. "The Rhetoric of the Nullifiers." Oratory of the Old South, edited by Waldo W.
Braden, Louisiana State UP, 1970, 19-72.
Faulkner, Charles James. "The Speeches of Charles Jas. Faulkner of Berkeley in the House of Delegates of Virginia, on the Policy of the State in Relation to Her Colored Population." T. W. White, 1832, Richmond.
Freehling, Alison Goodyear. Drift Toward Dissolution: The Virginia Slavery Debate of 1831-1832. Louisiana State UP, 1982, Baton Rouge.
Garland, Samuel. "Speech before the Virginia Legislature." Richmond Enquirer, 17 April 1832.
Gholson, James. "Speech before the Virginia Legislature," Richmond Enquirer, 21 Jan. 1832.
Greenberg, Kenneth S. editor. The Confessions of Nat Turner and Related Documents. Bedford St. Martin's, 1996, Boston, MA.
Goode, William O. "Speech before the Virginia Legislature." Richmond Enquirer, 19 Jan. 1832.
Helmers, Marguerite. "A Visual Rhetoric of World War I Battlefield Art: C. R. W. Nevinson, Mary Ritter Hamilton, and Kenneth Burke's Scene." The Space Between, vol. 5, no. 1, 2009, pp. 77-94. Historical Census Browser. University of Virginia. http://mapserver.lib.virginia.edu/php/start.php?year=V1830 Accessed 15 Apr. 2015.
King, Andrew. "Motive." The American Communication Journal, vol. 1, no. 3, 1998, http://ac-journal.org/journal/vol1/iss3/burke/king.html. Accessed 17 Jan. 2017.
Kuypers, Jim A. "Framing Analysis as a Rhetorical Process." Doing News Framing Analysis, edited by Paul D'Angelo and Jim A. Kuypers, Routeledge, 2010.
—. "From Science, Moral Poetics: Dr. James Dobson's Response to the Fetal Tissue Research Initiative." Quarterly Journal of Speech, vol. 86, no. 2, 2000, pp. 154-155.
McDowell, James. "Speech of James McDowell, Jr. (of Rockbridge) in the House of Delegates of Virginia, on the Slave Question: Delivered Saturday, January 21, 1832." 2nd edition. T. W. White, 1832, Richmond.
McGeough, Ryan Erik and Andrew King. "Dramatism and Kenneth Burke's Pentadic Criticism." Rhetorical Criticism: Perspectives in Action, 2n, edited by Jim A. Kuypers, Rowman and Littlefield, 2016, 147-166.
Moore, Samuel. "Speech before the Virginia Legislature." Richmond Enquirer, 19 Jan., 1832.
Munford, Beverley B. Virginia's Attitude Toward Slavery and Secession. Longman, 1910, New York.
Pleasants, John H. "Letter from the Senior Editor." The Constitutional Whig>. 29 August 1831.
Powell, Robert D. "Speech before the Legislature." Richmond Enquirer, 31 Jan. 1832.
Prelli, Lawrence and Terri S. Winters. "Rhetorical Features of Green Evangelicalism." Environmental Communication, vol. 3 vol. 2, 2009, 226.
Randolph, Thomas Jefferson. "Speech before the Virginia Legislature." Richmond Enquirer, 19 Jan.,1832.
"Realism." Oxford English Dictionary, 2nd Edition, https://en.oxforddictionaries.com/definition/realism. Accessed 17 Jan. 2017.
Rives, William. "Speech before the Virginia Legislature." Richmond Enquirer, 21 Jan., 1832.
Roane, William. "Speech before the Virginia Legislature," Richmond Enquirer, 14 Feb., 1832.
Robert, Joseph Clarke. The Road from Monticello: A Study of the Virginia Slavery Debate of 1832. Duke UP, 1941.
Root, Erik S. Sons of the Fathers: The Virginia Slavery Debates of 1831-1832. Lexington Books, 2010, Lanham, MD.
Rountree, Clarke III. "Coming to Terms with Kenneth Burke's Pentad." The American Communication Journal, vol. 1, no. 3, 1998, http://ac-journal.org/journal/vol1/iss3/burke/rountree.html Accessed 17 Jan. 2017.
Shell, John E. "Speech Delivered in the Virginia House of Delegates." Constitutional Whig>, 16 February 1832.
Stob, Paul. "Terministic Screens, Social Constructionism, and the Language of Experience in Kenneth Burke's Utilization of William James." Philosophy & Rhetoric, vol. 41, no. 2, 2008, pp. 130-152.
Summers, George W. "Speech before the Virginia Legislature," Richmond Enquirer, 14 Feb. 1832. "The Confessions of Nat Turner, as told to Thomas R. Gray on November 10, 1831." Melanet, http://www.melanet.com/nat/nat.html. Accessed 3 January 2017.
Towns, W. Stuart. Oratory and Rhetoric in the Nineteenth-Century South: A Rhetoric of Defense. Praeger, 1998, Westport, CT.
U.S. Census Office, Fifth Census, Tables [10]-[13].
Whitfield, Theodore M. Slavery Agitation in Virginia, 1829-1832. Johns Hopkins P, 1930, Baltimore, MD.
Williamson, Samuel H. and Louis P. Cain. "Measuring Slavery in 2011 Dollars," https://www.measuringworth.com/slavery.php Accessed 17 Jan. 2017.
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 44793 reads
Burke on Psychodynamic Aesthetics: Forms that Help Us Cope
Christian Kock, University of Copenhagen
Abstract
A discontinuity is sometimes claimed to exist between Burke's early literary aesthetics and his later work. I argue for a continuity: already in Counter-Statement (1931), the formal¸ aesthetically powerful properties of literature are among those that, in his later formulations, enable texts to be "equipment for living" and "symbolic action."
IT IS SOMETIMES ASSUMED THAT A DISCONTINUITY OCCURRED BETWEEN BURKE'S EARLY LITERARY AESTHETICS, with its emphasis on form, and his later work. I argue that there was continuity: already in Counter-Statement (1931), the formal properties of literature that bring aesthetic gratification are also among those that, in his later thinking, enable texts to be "equipment for living" and "symbolic action." Throughout, form was always a crucial factor in Burke's view of how discourse may impinge on people's lives. What broadened was the domain Burke considered. Throughout he aimed for "generalizations as to what poems do for everybody," as he wrote in Philosophy of Literary Form (73), but aesthetic form was also central to his understanding of what texts of any kind can "do."
From the beginning, Burke was fascinated by form and by discourse as equipment for living. When he wrote Counter-Statement, the material he discussed was mainly (while not exclusively) literature, but a primary concern of his was always form, wherever found, as equipment for living: as his scope broadened, he continued to study how form can help humans—speakers, writers, hearers, readers—cope with their lives.
I will discuss how Burke saw form as a psychodynamic agent, as discussed primarily in Counter-Statement. To offset what is distinctive in Burke, I will then set his thinking on this theme beside related ideas in some significant forerunners and contemporaries. Further, I will briefly exemplify how the psychodynamic function of form is evident in actual readers' experience of poetry. Finally, I will locate a similar effect of form in a piece of non-poetic discourse spoken into a critical social predicament: Winston Churchill's famous wartime speech on "blood, toil, tears, and sweat." I suggest that this analysis of the psychodynamics of form accentuates a constant and central theme in Burke's thought.
The Psychodynamics of Form
Much commentary on Burke posits a break away from the emergent school of "New Criticism," among whose precursors he is often counted. For example, René Wellek sees early Burke as a New Critical pioneer, but notes that he, like R.P. Blackmur, "later rejected the New Criticism in strong terms" and "moved away from his neo-critical beginnings" (613-14).
I suggest instead that Burke's thinking was always decisively different from New Critical doctrine, and that on the other hand his notions of how human discourse may function show a clear and original continuity.
In Counter-Statement Burke proposes an aesthetic psychology of literature, equating form with "the psychology of the audience" (31), whereas other critical schools with a psychological tilt usually mean the psychology of writers and/or fictional protagonists. Form, according to Burke, is the arousal and gratification of expectations in the reader—processes occurring in the reader during the process of experiencing the text. Clearly, such processes are even more central in the experience of (instrumental) music, whose elements lack the conventionally determined semantic meanings attaching to words, and in which purely formal phenomena for that reason acquire dominance. In fact, it seems plausible, as discussed by Bostdorff and Tompkins (1985), that Burke's early theory of aesthetic form in Counter-Statement grew out of his work in the late 'twenties as a music critic. The fact that the pivot of his aesthetic theory is a concept of form that is most obviously in evidence in music foregrounds the original etymology of the word "aesthetics": it concerns aisthēsis—i.e., sensory perception.
Aesthetics, however, is not all in Counter-Statement. There is also an awareness of an existential psychology of literature—of how it may help humans "encompass" situations in life. Later, Burke develops and further emphasizes the idea that symbolic action—in all kinds of discourse—helps people (writers and readers alike) encompass situations, although he sometimes tends to find the poetic mode of symbolic action superior to that of science because poetic visions of reality can better, through ongoing revision, encompass "recalcitrance" (cf., e.g., Permanence and Change, 257)—that is, the perceived world's resistance to the vision applied to it.
The idea that symbolic action can help encompass life situations is developed in Permanence and Change (1935) and Attitudes Toward History (1937), as documented by Prelli et al. (2011). The discontinuity assumed by some between Counter-Statement's insistence on the formal gratifications afforded by literature and the broader, existential psychology of symbolic action of all kinds in the following works is a misperception because the purely formal-aesthetic properties of texts are throughout an equal part of what endows them with existential-psychological functions (as "equipment for living").
Any rupture between Burke's early insistence on formal aspects of literary texts and his later interest in how all kinds of discourse can be symbolic action and equipment for living is thus imaginary. While championing a psychology of form, Burke sees literature as not only offering purely aesthetic gratification, but also as capable of cathartic or "propitiatory" action (a term used in Permanence and Change) —in part precisely by virtue of its formal properties.
To understand this better, recall how Burke often emphasizes the puzzling fact that we derive aesthetic gratification from form in works that we have read or seen many times; clearly the gratification they afford does not depend on new insight brought by their informational content. In this, literature differs from ordinary informative messages, but resembles music and ritual. Literature and music do something for readers/hearers—comparable to what ritual does for participants. In Philosophy of Literary Form (1941), Burke resolutely generalizes this idea: "We propose to take ritual drama as the Ur-from the 'hub,' with all other aspects of human action treated as spokes radiating from this hub" (103). But already in Counter-Statement we hear that literature, by adding form to human "patterns of experience," may provide cathartic release from the emotional stress such patterns generate: "Art, at least in the great periods when it has flowered, was the conversion, or transcendence, of emotion into eloquence and was thus a factor added to life" (41). A footnote describes Greek tragedy as "the sublimation of emotion into eloquence" (41). Eloquence equals form, in the Burkean sense circumscribed here. Turning situations into eloquence "encompasses" them; they achieve "poise and rhythm," providing gratification. The "truth" found in art is simply "the formulation of symbols which rigidify our sense of poise and rhythm" (42). Human predicaments supply art's content side, the substance in which art's cathartic eloquence (form) is embodied ("individuated")
Burke's concept of form includes expectation and its fulfillment, gratification. We might paraphrase him with a physical metaphor by saying that formally generated expectation builds up the "voltage" of the process by increasing the felt resistance (Burke might say "recalcitrance") and hence the reader's forward urge; "current" comes from the emotional subject-matter involved. The cathartic process is analogous to Ohm's law: voltage is proportional to current and to resistance.
Formal patterns have the power to engage because human beings are innately susceptible to them; this is true, for example, of what musicians call crescendo, and rhetoricians gradatio or climax: "the work of art utilizes climactic arrangement because the human brain has a pronounced potentiality for being arrested, or entertained, by such an arrangement" (45). The forms into which human experiences are embodied in literature provide gratification and cathartic effects because they fit the native susceptibilities of our minds in the way that keys fit locks. As symbol-using creatures we have a "feeling for such arrangements of subject-matter as produce crescendo, contrast, comparison, balance, repetition, disclosure, reversal, contraction, expansion, magnification, series, and so on. ... At bottom these 'forms' may be looked upon as minor divisions of the two major 'forms,' unity and diversity" (46).
Burke repeatedly underscores this connection between forms and innate susceptibilities:
The formal aspects of art appeal in that they exercise formal potentialities of the reader. They enable the mind to follow processes amenable to it. … The forms of art, to summarize, are not exclusively "aesthetic." They can be said to have a prior aesthetic in the experience of the person hearing or reading the work of art. … A form is a way of experiencing; and such a form is made available in art when, by the use of specific subject-matter, it enables us to experience in this way. (142-43)In A Rhetoric of Motives (1950), Burke further explores how formal devices are "functional":
processes of "identification" would seem to function here ... the audience feels as though it were not merely receiving, but were itself creatively participating in the poet's or speaker's assertion. ... we know that many purely formal patterns can readily awaken an attitude of collaborative expectancy in us. (57-58)
We see, then, that according to Burke even "mere" form without specific subject-matter (as in music) has the capacity to perform cathartic functions. But the themes and "patterns of experience" that literary works embody (Burke says "symbols" where most of us would say "themes") also have the capacity to fit like keys into the locks of a readers' minds, helping them cope with situations. As an example, Counter-Statement cites the works of Byron, which allowed readers to feel "Byronic" if thus inclined: "Mute Byrons (potential Byrons) were waiting in more or less avowed discomfiture for the formulation of Byronism, and when it came they were enchanted. ... the symbol being so effective, they called the work of Byron beautiful" (58). Thus a writer may provide for himself (and his readers) "a vocabulary to a situation (stressing such ways of feeling as equip one to cope with the situation)" (108).
This anticipates the "equipment for living" idea formulated in The Philosophy of Literary Form. The wording in Counter-Statement is that writers offer readers "appropriate symbols for encompassing a situation" (80). Situations may, as Burke will later say, show "recalcitrance," but formal/aesthetic appeal can help a symbol motivate and engage; symbol and form together accomplish "the conversion of an existential pattern into a formula for affecting the audience" (157).
What features tend to generate formal appeal? A look at Burke's examples of texts offering formal gratification reveals, for example, many cases of strongly contrasting or opposite properties coexisting very near each other, or even coinciding as aspects of the same element. His first example in the section "Psychology and Form" is Hamlet, Act I, Scene 1—where Hamlet and Horatio wait for the appearance of the ghost. Their expectation (and ours), deftly generated by Shakespeare, is diverted as they hear the strident sounds of the King's carousal offstage; they drift into a discussion of Danes' overindulgence in drink—and then: "Enter Ghost." Its arrival is eagerly expected and yet—because the dialogue has taken a different turn—a surprise (30): two opposite qualities in one element. This backhanded way of satisfying our "appetite" is particularly gratifying. The formal ploy coupled with the existential urgency of Hamlet's desire to meet his father's ghost (which generates our sympathetic desire) makes the moment uniquely powerful.
Our expectations and gratifications increase, rather than decrease, if, by re-reading, we become more familiar with the work and know what to expect. We enjoy an "exaltation at the correctness of the procedure, so that we enjoy the steady march of doom in a Racinian tragedy with exactly the same equipment as that which produces our delight with Benedick's 'Peace! I'll stop your mouth. (Kisses her)'"—this being the climactic moment in Benedick and Beatrice's romance in Much Ado about Nothing (37).
Form thus involves "desires and their appeasements" (31); however, desire/expectation is not only formal/physical, but also symbolic (i.e., generated by theme/content). Thus formal "voltage" and symbolic "current" are proportional. Gratification provided by the "symbol" (i.e., theme) is the other main type of literary appeal that Burke dissects. In many of his analyses, the manifold partly subliminal meanings clustering around a symbol are what accounts for the work's main aesthetic appeal—and at the same time for its capacity to serve a cathartic function. Here too, the factors that provide aesthetic gratification are also the ones that allow the text to serve as equipment for living. Poetic texts, like music, are not messages imparting insight or knowledge; if they were, we could not derive the same gratification and catharsis from them repeatedly, the more so the better we know them. Rather, they function like rituals, not like revelations: "Revelation is 'belief,' or 'fact.' Art enters when this revelation is ritualized, when it is converted into a symbolic process. . . . Art as eloquence, ceremony, ritual" (168).
This does not mean that Burke "separates" form from content. The formal appeal (the ritual form, we may say) moves a certain content forward, the content providing the motivating impulse. Correspondingly, ritual is the formal enactment of some content/story/myth/ narrative. Burke's main emphasis is precisely on the ritual nature of aesthetic experience: the cathartic power resides in the process itself, as in ritual, not in any new information or insight it provides:
The "thoughts" of a writer are not the mere "revelation," not the statements of a fact – the "thoughts" are the framing of this revelation in ritual. Accordingly, our savants err who attempt to catalogue for us the "thoughts" of a stylist like Milton, by stating them simply as precepts divorced from their stylistic context. The "thoughts" of a writer are the non-paraphrasable aspects of his work. (168-69)
Forebears and Parallels
Burke's ideas of what form in literature can do, not only in terms of aesthetic enjoyment, but also in ways that extend beyond the reading experience, may become clearer in light of a few anticipations as well as contemporary parallels.
A quasi-ritualistic understanding of the capability of literary experience was proposed, of course, by Aristotle in his brief mention of catharsis in the Poetics. In Burke's "Preface" to the second edition of Counter-Statement (1952), he says his view is the same as "the principle implicit in Aristotle's view of tragedy, his somewhat homœopathic notion that we are cleansed of emotional tensions by kinds of art deliberately designed to affect us with these tensions under controlled conditions" (xii).
Aristotelian catharsis assumes the same connection that this article asserts: on the one hand it involves the specific processes activated during the progressive experience of the tragedy, and limited to that experience, by the tragedy's distinctive properties—the expectations aroused in spectators and the gratification (the "tragic pleasure") they experience in seeing such-and-such a hero undergoing peripety, anagnōrisis and the rest; on the other hand that experience also has an effect that lingers as an "afterglow," and it is through that effect—for which the formal properties are enabling conditions—that a tragedy may become "equipment for living" for citizens of the polis. Burke sees an intimate connection between the purely formal-aesthetic gratification that pleases while experienced, and its afterglow that remains for a while, helping spectators cope with their emotional situation.
That catharsis mattered to Aristotle both as an aesthetic and a social concept is evident in his Politics. There, near the end, we find a lengthy discussion of the social roles of music (1339a-1342b), and of which kinds of music should be used for which purposes in the polis— whose overall purpose, as stated at the beginning of the Politics (1252a), is to secure as far as possible the good life for all its citizens. Catharsis is a process for which every citizen has a need, hence the state should make it available to all. A city-state aiming to secure the good life for all should provide music and tragedy and related artifacts for its citizens as equipment for living. Further, catharsis is a psychodynamic process activated by music no less than by art forms with a verbal component (such as tragedy). What matters for us is that music (i.e., instrumental music), which is, in a sense, pure form with no meaning content, can be just as cathartic as verbal artifacts, perhaps more so. Since semantic meaning is absent in instrumental music, it follows that the purely formal gratification provided to hearers is at least co-responsible for its psychodynamic effect. As for artifacts with a verbal or representational component, they provide cathartic experiences by virtue of formal properties and the semantic content that they represent (or "imitate").
An anticipation of Burke's thinking on form is also found, not surprisingly, in one of his literary heroes, Coleridge, whose reflections in Biographia Literaria, for example, discuss how versification can lend poems a distinctive kind of pleasure and at the same time enable them to offer readers an experience of willful mastery. This is particularly clear in Ch. XVIII, where Coleridge speaks of the "Origin and elements of metre": This I would trace to the balance in the mind effected by that spontaneous effort which strives to hold in check the workings of passion. It might be easily explained likewise in what manner this salutary antagonism is assisted by the very state, which it counteracts; and how this balance of antagonists became organized into metre (in the usual acceptation of that term), by a supervening act of the will and judgment, consciously and for the foreseen purpose of pleasure.
Significantly, Coleridge refers to "that pleasure, which such emotion, so tempered and mastered by the will, is found capable of communicating" (my emphasis). His is one of the few attempts in literary theory that may help explain the labor that poets invest in writing versified, rhyming discourse rather than prose. The imposition of versification onto words expressive of passionate emotion provides intense pleasure; whether Coleridge means to the poet or to the reader or to both alike is not specified, but Burke would say: to both. Further, Burke would claim it can communicate an experience that the passions thus treated have been mastered or "encompassed." Other poets of the first rank have also attested to the power of poetic form. John Donne, in "The Triple Fool," a poem on the frustration of unrequited love written around 1600, says:
Then, as th' earths inward narrow crooked lanes
Do purge sea waters fretful salt away,
I thought, if I could draw my pains
Through rhymes vexation, I should them allay.
Grief brought to numbers cannot be so fierce,
For he tames it, that fetters it in verse.
What we see here is elements of a Poetics quite along the lines of Burke's early thinking in Counter-Statement. Even the idea of catharsis or "purgation" is there. Burke's "propitiatory" view of what literature can do has a contemporary parallel in Freud's theory of humor (1928); humor is a tool developed by humanity to immunize us against the suffering that life forces on us. Mastery could be the common denominator between this and Burke's thinking on how poetry may be symbolic action and do something for readers (and writers), rather than tell them insightful truths. Poems, like humor, may allow us to feel that we master or encompass situations in life.
Another contemporary of Burke, the Russian psychologist L.S. Vygotsky, proposes a related idea in his early treatise The Psychology of Art (1925, English translation 1971). One of his main examples of cathartic form is Ivan Bunin's story "Gentle Breath," in which Vygotsky finds that the imposition of form on a deeply depressing plot imbues the reading experience with a feeling of lightness and, indeed, "gentle breath." And Vygotsky's analysis of Hamlet makes the overall point that the play achieves its cathartic power through form as it leads spectators unexpectedly and by devious and surprising routes to the eagerly awaited result.
In musicology, a seminal idea reminiscent of this and of Burke's aesthetic thinking was proposed by the composer and philosopher Leonard B. Meyer (1956), who argued that value and greatness in music are functions of expectations deferred and then fulfilled.
As mentioned, Burke's thinking is often aligned with that of his contemporaries, the "New Critics." For example, there is the notion of "the heresy of paraphrase," elaborated by Cleanth Brooks in The Well-Wrought Urn (1947). Comparing literature to an exquisite urn (the book title is drawn from Donne's poem "The Canonization"), Brooks asserts that a poem's value is not in its informational content; but at the same time he insists that a poem is more than a mute, well-formed artifact: the poet, he says, gives us "an insight which preserves the unity of experience and which, at its higher and more serious levels, triumphs over the apparently contradictory and conflicting elements of experience by unifying them into a new pattern" (214). We see here the characteristic New Critical valorization of "irony" and "paradox"—devices based on contradiction—and a belief in the power of poetry comparable to Burke's; however, we also see a doctrine that the New Critics never abandoned, but which Burke never held: that the power of poetry comes from the insight it brings. Such insight, the New Critics would insist, is of a "higher and more serious" kind, made un-paraphrasable by properties such as irony and paradox. In contrast, Burke sees what poetry provides as ritual action, including but not limited to insight. Its ritualistic or formal element accounts for much of what it can do. Burke, in Counter-Statement, certainly shows himself to be just as much of a connoisseur of irony and paradox as the New Critics, but he sees these devices as aspects of formal appeal; poetry is not revelation. Burke deviates from New Criticism by recognizing that what poetry/literature does, partly in virtue of its formal "eloquence" (or "rhetoric,") is not to provide knowledge or insight ("revelation"); nor is its function only to provide aesthetic gratification, but also to perform "corrective," "cathartic" or "catalytic" functions in the lives of readers (and writers). New Critics such as Cleanth Brooks shied away from embracing a truly psychodynamic poetics, relying instead on their ambiguous theory that poetry does provide insight or knowledge, only of a "higher," non-paraphrasable kind. They highlighted many of the same properties as Burke—irony, ambiguity, paradox, contrast—but had little to say on the function of poetry, being generally anti-psychological, anti-emotional, anti-sociological, etc., like many of the leading intellectuals and creative artists of their period. They tended to believe, with a famous quote from Archibald MacLeish, that "a poem should not mean / but be"; to Burke a poem certainly also means something, but what it means is a vehicle for what it can do. He saw the gratifications provided by form and "symbol" as together constituting the aesthetic potential of a text, and thus its cathartic potential. Symbolic and formal effects, while not the same, are coordinated: "Symbolic intensity arises when the artist uses subject-matter 'charged' by the reader's situation outside the work of art. … Formal charges may be attributed to arrangements within the work itself" (163-64). What poetry can do for writers and readers is this: "Increase of perception and sensitivity through increase of terminology (a character or a situation in fiction is as much a term as any definition in a scientific nomenclature). An equipment, like any vocabulary, for handling the complexities of living" (183).
Form in a Reader's Experience
That grief and other unwieldy emotions may be "fettered" in verse (to use Donne's term) is known and felt not just by poets, but also by their readers. I will offer one example of this, a statement made by a graduate student, John, who took a graduate course of mine on "Why and How We Read" at a large Midwestern university. Students in the course had been asked to bring along literary texts or passages that had given them powerful aesthetic experiences. John brought Dylan Thomas's frequently anthologized poem "Fern Hill." Its speaker recalls his youth in highly suggestive language that is often slightly deviant in innovative ways; it is a poem much quoted by literary theorists for examples of linguistic "foregrounding." Irregular though the poem is linguistically, it is extremely rule-bound formally, using the same intricate metrical pattern—John calls it a "homostrophic form"—in all six stanzas:
This isn't really the way he lived his youth and none of us have our lives as well defined as this ... what he is doing here is imposing order on something. This is a good contrast, he's dealing with a subject which is mutability itself, time, and he imposes order on it, it's kind of yoking of opposites ... Thomas is using a homostrophic form here to combat the kind of chaos which his personal life possessed and which the passing of time possesses for all of us . . .
In Counter-Statement, Burke assigned to aesthetic form a function of which the order-imposing effect described by John the reader and the "fettering" celebrated by John Donne the poet are specific examples. In the poetics Burke developed in Counter-Statement, we can observe what he later described by saying "I was trying to develop a theory of literary form" (1976, 62). By expressing themselves in form, writers and speakers communicate to themselves, and to readers or hearers, an experience of overcoming something that needs overcoming. Here we find a bridge, rather than a rupture, between what poetry does according to early Burke and what rhetorical action in general does according to later Burke.
Another way of asserting this is to say that Burke would have seconded Jeffrey Walker's argument against "the bifurcated views of 'literature' and 'rhetoric,' or of epideictic and practical civic rhetoric" (146).
Eloquence to Match Exigence
I would like in conclusion to offer an example of how sheer formal eloquence of the kind that early Burke primarily finds in poetry can function similarly in non-poetic, public rhetorical action—in this case, a celebrated piece of rhetoric addressing a nation in a desperate situation: the speech given by Winston Churchill to Parliament on May 13, 1940.
At this time, Germany was victorious on all fronts. British forces had been humiliatingly ousted from Norway, and Hitler's armies seemed unstoppable in France. Only three days before Churchill had succeeded Neville Chamberlain as Prime Minister. Chamberlain's appeasement policy, which Churchill had long opposed, had been discredited. Churchill too had opponents in all parties, but was seen as the only politician who, as Prime Minister, could muster the confidence of all parties. The speech, later that day broadcast to the nation, has been seen as the one that cemented Churchill's leadership and his status as master orator. His grandson, in a collection of his grandfather's speeches, writes: "With this speech, which was subsequently broadcast to the world, Churchill electrified the House and the nation. … In the House, as he sat down, there was a moment of stunned silence, followed by a wholly exceptional standing ovation" (Churchill 168). Likewise, there are numerous examples of the energizing effect the speech had on ordinary Britons; for example, Nellie Carver, a London woman, is quoted in Toye's monograph The Roar of the Lion as writing this on the day the speech was broadcast: "Winston's speeches send all sorts of thrills racing up and down my veins and I feel fit to tackle the largest Hun!" (8).
The speech is only 730 words long and took c. 6 minutes to deliver. The first two thirds of it (491 words) are held in formal, almost bureaucratic language, beginning with "On Friday evening last I received His Majesty's commission to form a new Administration." It continues in a style that might be described as "ceremonial," the parlance of parliamentary procedure, as in this representative excerpt: "I hope that any of my friends and colleagues, or former colleagues, who are affected by the political reconstruction, will make allowance, all allowance, for any lack of ceremony with which it has been necessary to act."
At just this point, moving into the last third of the speech, without any pause or paragraph, Churchill abruptly shifts into the pathos of the famous words: "I would say to the House, as I said to those who have joined this government: I have nothing to offer but blood, toil, tears and sweat." Between these words and the previous passage there is a contrast that must have been surprising to all and may have been shocking.
A first observation about form at this point is that countless aesthetically powerful artifacts—from folktales to operas—have a structure where the last third, or the last unit of three, while continuous with the first two, differs markedly from them. Churchill's last third is the celebrated part; yet it could not have had the resonance it achieved if the preceding two thirds had not prepared a foil for it. It follows here (reprinted after Churchill, 168-69):
We have before us an ordeal of the most grievous kind. We have before us many, many long months of struggle and of suffering. You ask, what is our policy? I can say: It is to wage war, by sea, land and air, with all our might and with all the strength that God can give us; to wage war against a monstrous tyranny, never surpassed in the dark, lamentable catalogue of human crime. That is our policy. You ask, what is our aim? I can answer in one word: It is victory, victory at all costs, victory in spite of all terror, victory, however long and hard the road may be; for without victory, there is no survival. Let that be realised; no survival for the British Empire, no survival for all that the British Empire has stood for, no survival for the urge and impulse of the ages, that mankind will move forward towards its goal. But I take up my task with buoyancy and hope. I feel sure that our cause will not be suffered to fail among men. At this time I feel entitled to claim the aid of all, and I say, "come then, let us go forward together with our united strength."
Burke in Counter-Statement lists "crescendo, contrast, comparison, balance, repetition, disclosure, reversal, contraction, expansion, magnification, series, and so on" as "potentialities of appreciation which would seem to be inherent in the very germ-plasm of man, and which, since they are constant, we might call innate forms of the mind" (46). The abrupt change before the last third of the speech instantiates some of these phenomena—one could see it as a sudden crescendo creating a resounding contrast between before and after. Burke notes: "Over and over again in the history of art, different material has been arranged to embody the principle of the crescendo; and this must be so cause we 'think' in a crescendo, because it parallels certain psychic and physical processes which are at the roots of our experience" (45).
From here on Churchill continues in elevated, almost liturgical style, with literate, semi-archaic words like ordeal, grievous, and others from a pathos-laden register. We now find recurrent, tiny deviations from an unmarked, communication-conveying style, as in many long months of struggle and of suffering—the second of is a small, almost unnoticeable deviation from how one might normally say this. Similarly in You ask, what is our policy? I can say . . . , can has a similar effect of slightly deviating from the standard phrase one might normally use (which would just be: I say).
Aristotle declares in the Rhetoric: "It is therefore well to give everyday speech an unfamiliar (xenikon) air: people like what strikes them, and are struck by what is out of the way" (1404b). Churchill's little deviations from daily idiomatic speech have this quality, yet the passage seems to heed Aristotle's further advice that a rhetor "must disguise his art and give the impression of speaking naturally nor artificially. Naturalness is persuasive, artificiality is the contrary" (1404b). In other words, a feeling of the "unfamiliar" must be conveyed, but hearers must not be conscious of the unfamiliarity as a deliberate device. A modern term for features that impart an "unfamiliar air" to a text is foregrounding; in several empirical studies it has been shown that foregrounding involving "defamiliarization" correlates with affect and even a feeling of "sublimity" in readers (Miall and Kuiken 1994; Miall 2007).
Another formal artifice has to do with expectations aroused and gratified—but not necessarily gratified in the expected way. Consider, for example, the words to wage war, by sea, land and air. This phrase may raise an expectation that an anaphoric series has been begun, with wage war as the repeated initial element. But the continuation is not a parallel phrase beginning with wage war, but instead an adverbial phrase: with all our might and with all the strength that God can give us—which in turn might create an expectation of another anaphoric series where with all . . . is the recurrent initial element. However, now that hearers have probably stopped expecting a series with wage war, we do in fact get a reiteration of wage war. We may recall Burke's Hamlet example: the ghost doesn't appear when expected, but when the talk changes and almost makes us forget about it, it appears.
Churchill thus repeatedly raises and gratifies his listeners' expectations—either by fulfilling them, or by circumventing them and then fulfilling them when not expected, or in ways not expected. He inserts apparent beginnings of parallelisms, having us guess whether there will in fact be a parallelism, and if so, how complete and long it will be. In the passage without victory, there is no survival. Let that be realised, the short sentence Let that be realised helps cancel a possible expectation that an anaphoric series with without victory is to begin; but as soon as that expectation is likely to be canceled in listeners' minds, it is fulfilled. Significantly, Churchill admiringly wrote about the oratory of his father: "No one could guess beforehand what he was going to say or how he would say it" (Toye 14).
In Counter-Statement, Burke dissects specimens of "expert prose" (133), highlighting the prevalence of "dissimilar balances"—sequences where units are "intellectually equivalent" but "formally diverse." In Churchill's speech we find the converse phenomenon: recurrent words and forms that turn out to have different meanings or functions. Consider this anaphoric series with its apparently similar relative clauses beginning with that: no survival for the British Empire, no survival for all that the British Empire has stood for, no survival for the urge and impulse of the ages, that mankind will move forward towards its goal. The first that-clause here is clearly a defining relative clause: it defines the scope of all. It is then natural to understand the second that-clause, beginning with that mankind... , similarly, i.e., as defining the scope of the ages. But in retrospect it turns out to be a parenthetical clause, relative to the noun phrase the urge and impulse of the ages: the object of the urge and impulse is that mankind will move forward towards its goal. Hearers are momentarily led to understand that they are hearing a complete parallelism, but must revise that understanding retrospectively. Linguists call such structures "garden path phenomena" (Pritchett 1988).
The synonyms urge and impulse themselves may momentarily challenge hearers' interpretive capacities, making them inadvertently seek a subtle semantic difference between these two nouns of apparently identical meaning: if Churchill intends no such difference, why does he use both? But this spontaneous reaching out after a supposed semantic nuance may pass as the next sentences follow, and what is left in hearers' minds may then be a vague sense that more meaning was conveyed here than they had time to grasp. This use of synonyms is distinctive of discourse that is generally felt to be elevated or sacred—for example, the poetry of the Old Testament (cf. Jakobson 1966).
I would suggest that numerous tiny effects of these kinds in the last third of Churchill's speech (Burke might say "a frequency of formal eloquence") are apt to induce an affect, a sense of elevating grandeur, scope, and power in the words, that transfers to the hearer. I should emphasize that I do not assume hearers may have had a conscious awareness of all these small features that would enable them to analyze them in the way I have suggested here. On the contrary: as Aristotle repeatedly points out, the "unfamiliar" stylistic air that he counsels orators to assume, depends for its effects on its being "disguised," i.e., not registered consciously by hearers.
In A Rhetoric of Motives (1950) Burke observes that "purely formal patterns can readily awaken an attitude of collaborative expectancy in us," and that "where a decision is still to be reached, a yielding to form prepares for assent to matter identified with it. Thus, you are drawn to the form, not in your capacity as a partisan, but because of some 'universal' appeal in it" (57-58); in other words, the effect of a formal pattern may be that "on the level of purely formal assent you would collaborate to round out its symmetry by spontaneously willing its completion and perfection as an utterance" (58-59). This "purely formal" appeal to the audience is, he again asserts in a later essay ("Rhetoric and Poetics," in Language as Symbolic Action, 1966), "universal. Hence, an audience can readily yield to this aspect of an exhortation" (296). Already in Counter-Statement Burke spoke about "the value of formal appeal in inducing acquiescence. For to guide the reader's expectations is already to have some conquest over him" (178).
There is in fact a great deal of empirical evidence that the May 13 speech helped Churchill have conquest. It won him a unanimous vote of confidence in Parliament, and Britons as well as occupied peoples felt increasingly energized to fight the "Hun"—although he had said nothing substantially new in the speech, offered no arguments for his intransigent attitude towards Germany (which many Britons questioned), and offered nothing but "blood, toil, tears and sweat." Instead, it seems plausible that this speech and others helped Churchill's audiences "encompass" Britain's situation by sheer formal means. This suggests that the formal devices Burke knew from poetry can also be "propitiatory" and serve as equipment for living when used in rhetorical action in response to a critical worldly exigence.1
Recently, rhetorical affect theory has focused on workings of rhetorical utterances akin to what we find in Churchill's celebrated oratory, or in great poetry. Jenny Edbauer Rice, in a discussion on recent work in affect theory, notes: "affective energies will still remain part of rhetoric, discourse, and communication. Theories of affect are worth our time and our attention, even if not yet our full agreement" (211).
I suggest that Burke would have welcomed affect theory on the critical scene. He discussed and analyzed form-induced affect more thoroughly than anyone else in his lifetime. There was no discontinuity between his early aesthetic formalism and his later life-encompassing rhetoric. The observations on quasi-ritual effects of form in literature that dominate his earliest book are continuous with his later thinking on language as symbolic action. Throughout he saw form in language as equally powerful, and similarly powerful. This was inherent in his literary theory and criticism from the beginning and remained central as he expanded his purview to the entire realm of discourse. Rhetorical scholars would do well to always take the psychodynamic power of form into account in their analysis and critique of rhetorical action.
Note
1. A parallel to this reading of Churchill's historic speech is an analysis of Lincoln's Gettysburg Address by the Shakespeare scholar Stephen Booth (1998). Just as Churchill has numerous inconspicuous deviations from ordinary idiomatic English, so also Booth finds that the "simple, straightforward" Address is in fact "full of small gratuitous stylistic perversities that complicate—but do not weaken—our perceptions of the continuity and connection that syntax, logic, and phonetic patterning assert" (38). According to Booth, these "perversities" make the hearer feel, on the one hand, that he fully grasps the speaker's meaning, but on the other hand that this meaning, paradoxically, has a depth and complexity beyond his normal reach.
Works Cited
Aristotle. The Complete Works of Aristotle. The Revised Oxford Translation. Ed. Jonathan Barnes. Vol. II. Princeton: Princeton UP, 1984. Print.
Booth, Stephen. Precious Nonsense: the Gettysburg Address, Ben Jonson's Epitaphs on his Children, and Twelfth Night. Berkeley: U of California P, 1998. Print.
Bostdorff, Denise M., and Phillip K. Tompkins. "Musical Form and Rhetorical Form: Kenneth Burke's Dial Reviews as Counterpart to Counter-Statement." Pre/Text: A Journal of Rhetorical Theory 6 (1985): 235-52. Print.
Brooks, Cleanth. The Well-Wrought Urn: Studies in the Structure of Poetry. New York: Harcourt, Brace & World, 1947. Print.
Burke, Kenneth. Counter-Statement. Berkeley: U of California P, 1931. Print.
—. Permanence and Change. 1935. 2nd ed. Berkeley: U of California P, 1994. Print.
—. Counter-Statement. Berkeley: U of California P, 1931. Print.
—. Attitudes Toward History. Berkeley: U of California P, 1937. Print.
—. Philosophy of Literary Form. Berkeley: U of California P, 1941. Print.
—. The Rhetoric of Motives. Berkeley: U of California P, 1950. Print.
—. Language as Symbolic Action. Berkeley: U of California P, 1966. Print.
—. Counter-Statement. Second Edition. Berkeley: U of California P, 1968. Print.
—. "The Party Line." Quarterly Journal of Speech, 62.1 (1976): 62-68. Print.
Churchill, Winston S. Never Give In! Winston Churchill's Speeches. Ed. Winston S. Churchill. London: Bloomsbury, 2004. Print.
Freud, Sigmund. Der Witz und seine Beziehung zum Unbewußten. Leipzig/Wien: Franz Deuticke,1905. Print.
—. 1928. "Der Humor". Almanach der Psychoanalyse 1928. Ed. I A.J. Storfer. Wien: Internationaler Psychoanalytischer Verlag. 1928. Reprinted in Studienausgabe, Band IV. Frankfurt/M.: S. Fischer Verlag. 1972. 275-82. Print.
Jakobson, Roman. "Grammatical Parallelism and its Russian Facet." Language 42.2 (1966): 399-429. Print.
Meyer, Leonard B. Emotion and Meaning in Music. Chicago: U of Chicago P, 1956. Print.
Prelli, Lawrence, Floyd Anderson, and Matthew Althouse. "Kenneth Burke on Recalcitrance." Rhetoric Society Quarterly, 41.2 (2011): 97-124. Print.
Pritchett, Bradley L. "Garden Path Phenomena and the Grammatical Basis of Language Processing." Language (1988): 539-76. Print.
Rice, Jenny Edbauer. "The New 'New': Making a Case for Critical Affect Studies." Quarterly Journal of Speech 94 (2008): 200-12. Print.
Toye, Richard. The Roar of the Lion: The Untold Storyof Churchill's World War II Speeches. Oxford: Oxford UP, 2013. Print.
Vygotsky, Lev Semenovich. The Psychology of Art. Cambridge, MA: MIT P, 1971. Print.
Walker, Jeffrey. "What Difference a Definition Makes, or, William Dean Howells and the Sophist's Shoes." Rhetoric Society Quarterly 36.2 (2006): 143-53. Print.
Wellek, Rene. "The New Criticism: Pro and Contra." Critical Inquiry (1978): 611-24. Print.
This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
- 21874 reads
Indexing: Kenneth Burke's Method of Textual Analysis
David Erland Isaksen, University College of Southeast Norway
Click on the image to load this multimedia project, or go here.
- 18461 reads